WeTurtle è il partner ideale delle scuole che desiderano affiancare un ambiente di apprendimento digitale e interattivo per docenti e studenti a tutti quegli ambienti fisici e alle forniture tecnologiche di cui si stanno dotando grazie al Piano Scuola 4.0.
In che modo un robot può fermarsi ad una certa distanza da un oggetto, rilevare la posizione approssimativa del telecomando a raggi infrarossi, essere controllato in remoto? Il kit “Lego® Mindstorms® EV3 Education” può essere accessoriato con il sensore infrarosso...
Ti interessa approfondire il kit Lego® Mindstorms® EV3 Education? A questo link trovi un corso online gratuito e certificato che potrai seguire quando e come vuoi!
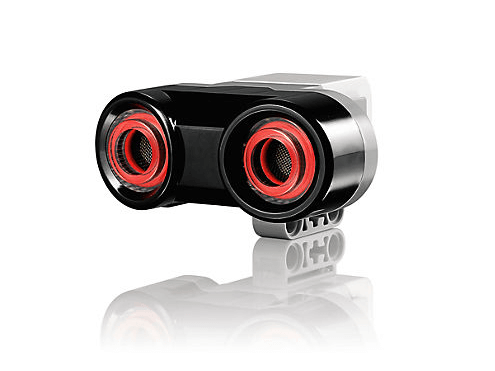
Caratteristiche del sensore infrarosso e del telecomando a raggi infrarossi
Il sensore infrarosso è un sensore che sfrutta la luce infrarossa, una luce con frequenza inferiore a quella della luce visibile. Viene detta “infrarossa”, ovvero “sotto il rosso”, perché il rosso è il colore visibile con la frequenza più bassa. Il telecomando a raggi infrarossi è un dispositivo separato che sfrutta lo stesso tipo di segnale del sensore infrarosso.
Il sensore infrarosso può essere impostato in tre modalità:
Prossimità
Beacon
Telecomando
Registrati a WeTurtle per accedere ai vantaggi, è gratis!
Un'area personalizzata con i tuoi contenuti preferiti
Una lezione di prova gratuita per ogni corso online
Dirette ed eventi dedicati agli utenti iscritti
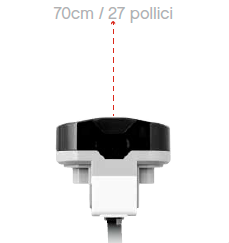
In modalità Prossimità (fig. 1), il sensore utilizza la potenza del segnale ad infrarossi per stimare la prossimità (distanza) da un oggetto: questo segnale viene emesso dal sensore infrarosso e viene riflesso se viene posto qualcosa davanti al sensore. Il sensore fornisce un valore numerico, non corrispondente direttamente a una distanza specifica, ma inteso come valore percentuale su una scala da 0 (molto vicino) a 100 (molto lontano). A seconda delle dimensioni, della forma, del colore e del materiale dell’oggetto, il sensore è in grado di rilevarne la presenza a una distanza massima di 70 centimetri.
In modalità Beacon (fig. 2), il sensore utilizza la potenza del segnale ad infrarossi per identificare e per stimare la posizione (prossimità e direzione) del telecomando: questo segnale viene emesso continuamente dal telecomando a raggi infrarossi, una volta acceso tramite il pulsante posto nella parte superiore e scelto uno dei quattro canali con il selettore a slitta rosso posto nella parte inferiore, e viene rilevato dal sensore infrarosso fino a una distanza di circa 200 centimetri nella direzione verso cui è rivolto.
Per quanto riguarda l'identificazione del telecomando, il sensore è in grado di fornire un valore logico (vero o falso) a seconda che rilevi o meno un segnale ad infrarossi sul canale specificato.
Per quanto riguarda la prossimità del telecomando (distanza relativa dal sensore), il sensore è in grado di fornire un valore numerico, non corrispondente direttamente a una distanza specifica, ma inteso come valore percentuale su una scala da 0 (molto vicino) a 100 (molto lontano). Se il sensore restituisce un valore pari a 100 significa che non è stato rilevato alcun telecomando.
Per quanto riguarda la direzione del telecomando (angolo dalla direzione in cui sta puntando il sensore), il sensore è in grado di fornire un valore numerico, non corrispondente direttamente a un angolo specifico, ma inteso come valore percentuale da -25 (verso sinistra) a 25 (verso destra). Se il sensore restituisce un valore pari a 0 significa che il telecomando si trova direttamente davanti al sensore infrarosso.
In modalità Telecomando (fig. 3), il sensore può rilevare quale pulsante, o combinazione di pulsanti, viene premuta sul telecomando. In particolare, il sensore è in grado di fornire un valore numerico, che va da 0 a 11, a seconda di ciò che viene premuto:
0 = Nessun pulsante (Modalità Beacon disattivata)
1 = Pulsante 1
2 = Pulsante 2
3 = Pulsante 3
4 = Pulsante 4
5 = Pulsante 1 e pulsante 3
6 = Pulsante 1 e pulsante 4
7 = Pulsante 2 e pulsante 3
8 = Pulsante 2 e pulsante 4
9 = Modalità Beacon attivata
10 = Pulsante 1 e pulsante 2
11 = Pulsante 3 e pulsante 4
Il pulsante della modalità Beacon (ID pulsante = 9) funziona in modo diverso rispetto agli altri quattro pulsanti: quando si preme il pulsante della modalità Beacon, il telecomando inizia a trasmettere continuamente finché non si preme di nuovo il pulsante per spegnerlo. Gli altri quattro pulsanti trasmettono solo quando vengono premuti e smettono di trasmettere quando vengono rilasciati.
Installazione del sensore infrarosso
L’installazione è immediata e semplice: per poter funzionare basta connetterlo, attraverso i cavi neri di connessione, al mattoncino EV3 utilizzando le porte di ingresso 1, 2, 3 e 4 (fig. 4). Se crei un programma mentre il mattoncino EV3 è disconnesso dal pc, il software assegna il sensore infrarosso alla porta predefinita 4. Se connetti il mattoncino EV3 al pc durante la programmazione, il software identifica automaticamente in quale porta è collegato il sensore infrarosso.
Per verificare che l’installazione sia andata a buon fine è possibile visualizzare in diretta il valore che sta leggendo il sensore.
Esistono due modi per svolgere questa operazione:
Visualizzazione nel mattoncino EV3
Visualizzazione nel software Lego® Mindstorms® EV3 Education
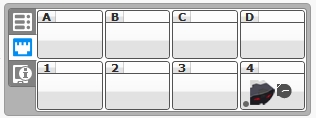
Nel primo caso, utilizza l'interfaccia del mattoncino EV3 e le sue quattro schermate di base (fig. 5), che consentono di accedere a diverse funzioni esclusive. Utilizzando la funzione Port View (fig. 6), che trovi nella schermata Applicazioni, è possibile visualizzare un riepilogo delle porte a cui sono collegati i sensori. Con i pulsanti direzionali del mattoncino puoi accedere alla porta occupata dal sensore infrarosso e consultare le letture correnti restituite dal sensore. Con il pulsante centrale puoi controllare e modificare le impostazioni correnti relativo al sensore collegato.
Nel secondo caso, utilizza la pagina hardware del software Lego® Mindstorms® EV3 Education, situata nell’angolo inferiore destro dell’ambiente di programmazione. All’interno della pagina hardware, scegli la scheda Visualizzazione Porte (fig. 7) per visualizzare le informazioni sui sensori connessi al mattoncino EV3. Quando connetti il mattoncino EV3 al computer, queste informazioni vengono identificate automaticamente per permetterti di visualizzare i valori letti dal sensore in tempo reale. Cliccando sopra l’icona del sensore collegato puoi controllare e modificare le relative impostazioni correnti.
Il sensore infrarosso può essere impiegato in diverse modalità e con diversi blocchi di programmazione. Di seguito sono riportati solo alcuni esempi di come utilizzarlo nel software Lego® Mindstorms® EV3 Education.
Esempio 1: Arrestarsi in prossimità di un muro o di un oggetto
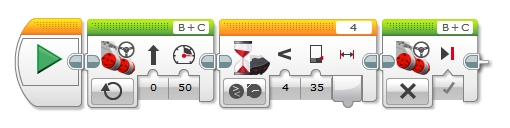
Questo programma (fig. 8), se il sensore infrarosso è rivolto in avanti, fa spostare il robot in avanti finché il sensore infrarosso non rileva di essere in prossimità di un muro o di un oggetto. Il programma utilizza il blocco Attesa in modalità Sensore infrarosso - Confronto - Prossimità per attendere che la prossimità rilevata diventi inferiore a 35.
Esempio 2: Pronunciare la parola “rilevato” quando il telecomando a raggi infrarossi si trova direttamente davanti al sensore
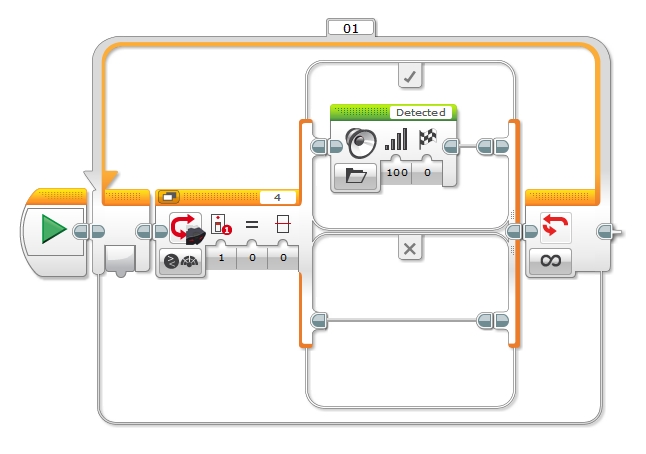
Questo programma (fig. 9) fa pronunciare la parola “rilevato” al robot ogni volta che il sensore infrarosso rileva che il telecomando a raggi infrarossi è acceso ed è posto direttamente davanti al sensore, ovvero ogni volta che restituisce un valore di direzione pari a 0. Il programma utilizza un blocco Selettore in modalità Sensore infrarosso - Confronto – Direzione beacon per testare se la direzione rilevata è pari a 0. In caso affermativo, il selettore fa pronunciare la parola “rilevato” al robot. Il selettore viene ripetuto in un ciclo in modo che il test venga ripetuto continuamente. Utilizzando la modalità Beacon, il sensore infrarosso rileva il telecomando a raggi infrarossi solo se il telecomando è acceso ed è impostato sul canale specificato nel programma: il robot quindi pronuncerà la parola “rilevato” solo se il telecomando è acceso ed è impostato sul canale 1.
Esempio 3: Spostarsi in base al pulsante premuto sul telecomando
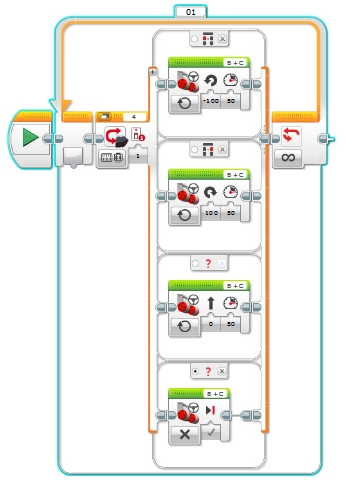
Questo programma (fig. 10) fa spostare il robot in base a quale pulsante, o combinazione di pulsanti, viene premuta sul telecomando a raggi infrarossi e viene rilevata dal sensore infrarosso. Il programma utilizza un blocco Selettore in modalità Sensore infrarosso - Misura - Telecomando per scegliere tra 4 diversi tipi di spostamento a seconda di quale pulsante o di quali pulsanti vengono premuti e rilevati. Il robot gira a sinistra o a destra se vengono premuti i pulsanti di direzione in alto a sinistra (ID pulsante = 1) o in alto a destra (ID pulsante = 3), avanza in linea retta se vengono premuti entrambi i pulsanti contemporaneamente (ID pulsante = 5). Viene aggiunto e impostato come predefinito un caso " ID pulsante = 0" in modo che il robot arresti i motori se non viene premuto alcun pulsante. Il selettore viene ripetuto in un ciclo in modo che il test venga ripetuto continuamente. Utilizzando la modalità Telecomando, il sensore infrarosso rileva i pulsanti premuti sul telecomando a raggi infrarossi solo se il telecomando è acceso ed è impostato sul canale specificato nel programma: il robot quindi si sposterà solo se il telecomando è acceso ed è impostato sul canale 1.
Il sensore infrarosso basa il suo funzionamento sui segnali di luce ad infrarossi. La luce del sole può influenzare questo tipo di segnali, anche se la normale illuminazione di un ambiente non dovrebbe produrre interferenze.
Il sensore infrarosso non può rilevare oggetti molto vicini (a meno di 1 centimetro).
Il telecomando a raggi infrarossi dispone di un selettore del canale che consente di scegliere uno dei quattro diversi canali per i segnali. Se due robot vengono controllati da due telecomandi diversi, dovrebbero utilizzare canali diversi, altrimenti un telecomando controllerà tutti i robot impostati sul proprio canale.
Ti è piaciuto il tutorial?
Se vuoi maggiori informazioni o una consulenza o se vuoi far parte della famiglia We Turtle scrivi all'indirizzo email: info@weturtle.org Per restare sempre aggiornato iscriviti alla Newsletter e segui We Turtle e Talent su Facebook.
Ottieni uno spazio di apprendimento con contenuti didattici per docenti e studenti, dove facilitare lo scambio e favorire la comunità di pratica e dove tenere sotto controllo i progressi della classe e dei docenti.
Vuoi leggere il tutorial quando vuoi, anche offline?
Come gli ingranaggi hanno segnato l’infanzia di Seymour Papert, così i mattoncini Lego hanno segnato la mia.
Tutto il tempo passato ad attaccarli e smontarli ha fatto nascere in me una grande curiosità...
Come gli ingranaggi hanno segnato l’infanzia di Seymour Papert, così i mattoncini Lego hanno segnato la mia.
Tutto il tempo passato ad attaccarli e smontarli ha fatto nascere in me una grande curiosità...
Novità: pacchetti formativi personalizzati e piani di abbonamento per le Scuole
Crea il tuo account gratuito con 3 click… e ottieni i vantaggi!
ISCRIZIONE RIUSCITA!
Benvenuto nella Community di WeTurtle. Ora sei pronto per iniziare la tua formazione!
Clicca su INIZIA e potrai accedere alla tua Area Riservata.
Benvenuto nella Community di WeTurtle. Ora sei pronto per iniziare la tua formazione!
Ti abbiamo inviato una email con le informazioni relative alla lezione di prova.
Clicca sul bottone qui sotto e potrai accedere al contenuto. Buona visione!
Benvenuto nella Community di WeTurtle. Ora sei pronto per iniziare la tua formazione!
Clicca sul bottone qui sotto e otterrai il pdf del contenuto. Buona lettura!
Benvenuto nella Community di WeTurtle. Ora sei pronto per iniziare la tua formazione!
Clicca sul bottone qui sotto e salverai il contenuto tra i tuoi preferiti. Buona lettura!
Benvenuto nella Community di WeTurtle. Ora sei pronto per iniziare la tua formazione!
Clicca sul bottone qui sotto e potrai scaricare l'ebook che hai scelto. Buona lettura!
ISCRIZIONE NON RIUSCITA!
Hai inserito un indirizzo email già presente nel nostro database.
Se non riesci a eseguire il login effettua la procedura per il recupero della password o scrivi a info@weturtle.org.
SI È VERIFICATO UN PROBLEMA!
L'iscrizione non è andata a buon fine. Prova a ripetere la procedura.
Se continui a riscontrare problemi contattaci via mail a info@weturtle.org.





 Tempo di lettura/visione: 7 min
Tempo di lettura/visione: 7 min



 Riferimenti e links
Riferimenti e links