Pre-requisiti:
È consigliabile che gli alunni abbiano una certa familiarità con la metodologia di lavoro project-based e basata sul team, sebbene non siano requisiti necessari.
Sarebbe preferibile che ci sia una conoscenza base anche del software di programmazione Lego® Mindstorms® EV3 Home Edition.
Il progetto verrà sviluppato in 2 incontri da due ore ciascuno, seguendo la linea guida di seguito proposta.
1° incontro
Inizialmente si potranno presentare gli obiettivi progettuali e una breve introduzione alla robotica nel caso in cui per gli studenti sia la prima esperienza di questo tipo.
Li si potrà far ragionare in modalità di brainstorming su domande di questo tipo:
- Che cos’è un robot?
- A che cosa serve?
- Qual è l’origine della parola robot?
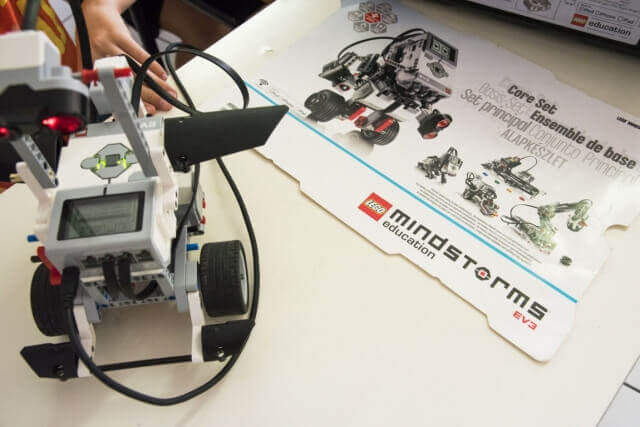
Dopo questo primo momento, i ragazzi potranno essere suddivisi in team da 3-4 elementi; a questo punto inizierà la fase di costruzione del robot, seguendo le istruzioni in pdf che si trovano al link precedentemente indicato. Per gli esperimenti di seguito presentati, sarà sufficiente costruire il robot fino alla sua forma base (senza i sensori). Gli studenti potranno collaborare nel loro gruppo rispettando dei ruoli, che ad esempio potrebbero essere i seguenti:
- Progettista : interpreta e istruzioni di montaggio del robot e le comunica agli altri; è il responsabile del progetto.
- Magazziniere : cerca i pezzi corretti dentro la scatola e li passa al tecnico assemblatore. È il responsabile del kit Lego®, e (in teoria) dovrebbe essere l’unico a mettere le mani dentro la scatola.
- Tecnico assemblatore : assembla i pezzi seguendo le indicazioni del progettista.
- Validatore : controlla il corretto assemblaggio del robot, passo dopo passo, e il corretto lavoro del gruppo nel complesso (es. il rispetto dei ruoli).
- Reporter (nel caso di gruppi da 5 alunni): documenta la costruzione del robot utilizzando uno smartphone per fare foto e video del lavoro.
Per far sì che gli alunni sperimentino tutti i ruoli, ogni 8-10 minuti l’insegnante dà un segnale che indica il cambio dei ruoli facendo ruotare i ragazzi attorno al tavolo.
Si potrebbe utilizzare anche una regola aggiuntiva: gli unici due elementi che possono guardare le istruzioni sono il progettista e il validatore, che quindi devono essere così bravi da riuscire a spiegare tutti i vari passaggi in maniera esclusivamente verbale.
Prima di iniziare l’acquisizione dei dati, qualora gli studenti non conoscano il software introdurre i due blocchi principali per il primo esperimento: il blocco
“Start”, fondamentale per l’inizio di ogni sequenza, e il blocco
“Move Steering” (categoria Actions), che permette di accendere contemporaneamente i motori del robot (nel caso del modello costruito attaccati alle porte B e C dell’unità centrale).
Come si osserva nella figura seguente, cliccando nel bottone a sinistra del blocco si può impostare la modalità di attivazione dei motori; il primo parametro rappresenta la direzione del robot (cambiando il numero si vede come cambia la freccia associata), il secondo parametro rappresenta la potenza dei motori (in percentuale rispetto alla potenza massima erogabile), il terzo parametro dipende dalla modalità scelta di attivazione (secondi, gradi, rotazioni), l’ultimo parametro se impostato a true attiva i freni al termine del movimento del robot, o comportamento opposto se impostato a false.






 Tempo di lettura/visione: 8 min
Tempo di lettura/visione: 8 min Consigliato per la fascia d'età: SECONDARIA II GRADO
Consigliato per la fascia d'età: SECONDARIA II GRADO Adattabile alla fascia d'età: SECONDARIA I GRADO
Adattabile alla fascia d'età: SECONDARIA I GRADO
 Obiettivi e Competenze
Obiettivi e Competenze Strumenti
Strumenti Metodologia didattica
Metodologia didattica
 Linee guida delle attività
Linee guida delle attività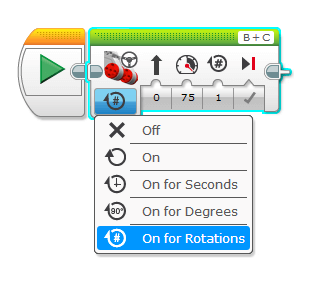


 Risultati attesi
Risultati attesi Riferimenti e links
Riferimenti e links