LEZIONI E FORMAZIONE DAI DOCENTI PER I DOCENTI
Scopri WeTurtle, la community di educatori dove trovare e condividere risorse innovative
L'inseguitore di linea con Lego Mindstorms EV3
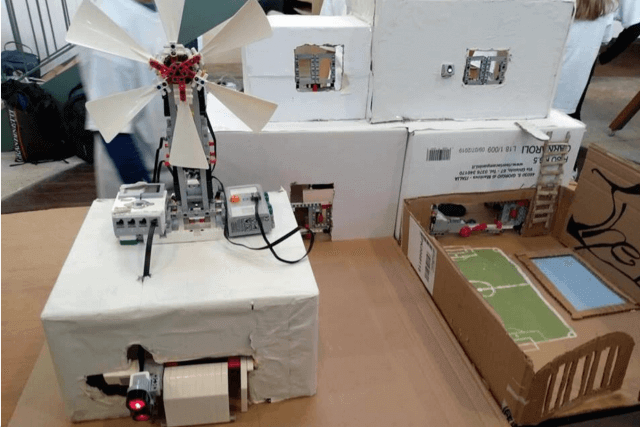
Vi proponiamo un progetto di robotica educativa per la scuola secondaria di secondo grado (adattabile alla secondaria di primo grado). L’attività è stata lungamente sperimentata in ambito scolastico durante l’anno accademico 2016/2017.Inseguire una linea è uno dei tipici...

Robotica




 Tempo di lettura/visione: 20 min
Tempo di lettura/visione: 20 min
 Consigliato per la fascia d'età: SECONDARIA II GRADO
Consigliato per la fascia d'età: SECONDARIA II GRADO
 Adattabile alla fascia d'età: SECONDARIA I GRADO
Adattabile alla fascia d'età: SECONDARIA I GRADO

Introduzione
Vi proponiamo un progetto di robotica educativa per la scuola secondaria di secondo grado (adattabile alla secondaria di primo grado). L’attività è stata lungamente sperimentata in ambito scolastico durante l’anno accademico 2016/2017.
Inseguire una linea è uno dei tipici problemi della teoria del controllo: significa ottenere un comportamento desiderato da un sistema (il robot) che segue un certo riferimento (una linea).
Ma perché un robot dovrebbe seguire una linea? Sicuramente perché in questo modo lo si potrebbe far muovere con una certa sicurezza all’interno di uno spazio, senza dover ricorrere ad altri concetti ingegneristici come l’odometria [1].
Alcuni esempi dal mondo reale di robot che funzionano sfruttando questa soluzione:
- Ristoranti [2] [3]
- Mondo industriale [4]
- Mondo health care [5]
L’attività di seguito proposta è stata sperimentata con le classi terze o quarte dei seguenti Istituti:
- Liceo Scientifico e Scienze Applicate Leopardi di Recanati
- Liceo Scientifico e Scienze Applicate Galilei di Ancona
- Liceo Scientifico e Scienze Applicate Volta di Riccione
- Liceo Artistico Mannucci di Ancona
L’articolo è stato premiato come Best Paper alla conferenza Didamatica 2017, organizzata da AICA. Cosa che ci riempie di orgoglio.
Pre-requisiti:
- Conoscenza di base del kit LEGO® Mindstorms® EV3 Education ed in particolare del sensore di luce e colore [9]
- Conoscenza di base del Software LEGO® Mindstorms® EV3 Home Edition
Ti interessa approfondire il kit Lego® Mindstorms® EV3 Education? A questo link trovi un corso online certificato che potrai seguire quando e come vuoi!
La progressione didattica progettata per un percorso di 6 incontri (12 ore) è la seguente:
Incontro 1- Introduzione alla robotica, costruzione del robot
Incontro 2- Primi test di programmazione (accensione motori, test di utilizzo del sensore ad ultrasuoni per evitare ostacoli)
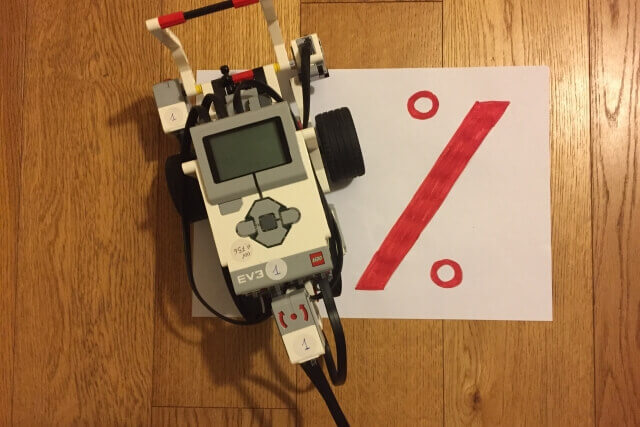
Incontro 3 - Trovare una linea nera e fermarsi (Leggere i valori rilevati dal sensore su nero e bianco)
Incontro 4 - Algoritmo ON-OFF
Incontro 5 - Algoritmo proporzionale (P controller)
Incontro 6 – Sfida Finale!
I primi due incontri
Nel primo incontro è importante:
- Formare i gruppi di lavoro;
- Definire e condividere con gli studenti gli obiettivi progettuali;
- Contestualizzare l’inseguitore di linea. A cosa serve questa tecnica? Quando viene usata? Si vedano ad esempio gli spunti nell’introduzione. [2] [3] [4] [5]
Dopo aver costruito il robot e aver fatto i primi test di programmazione (ad esempio vedi incontro 1 e 2 “Robotcar e il moto rettilineo” [10], oppure il percorso "Introduzione alla Robotica con Lego Mindstorms EV3") si prosegue con le attività (il dettaglio nella sezione "Programma").
Registrati a WeTurtle per accedere ai vantaggi, è gratis!
La community di docenti e educatori ti offre:

Il corso gratuito "Collaborare a scuola con il digitale"
Un'area personalizzata con i tuoi contenuti preferiti
Una lezione di prova gratuita per ogni corso online
Dirette ed eventi dedicati agli utenti iscritti
 Obiettivi e Competenze
Obiettivi e Competenze
- Costruire un semplice modello matematico rispetto ad un problema posto (inseguire una linea).
- Utilizzare elementi base di programmazione (esecuzione sequenziale, ciclica e condizionata di istruzioni).
- Scoprire e utilizzare gli elementi base della teoria del controllo (feedback o retroazione).
- Comprendere gli algoritmi utilizzati in gran parte dei sistemi automatici (industriali e non).
- Accrescere l’interesse verso le discipline STEM (Science Technology Engineering Maths).
- Migliorare la capacità degli studenti di lavorare in gruppo.
- Accrescere la consapevolezza degli alunni verso i propri processi cognitivi attraverso la valutazione dell’Alternanza.
 Metodologia didattica
Metodologia didattica
L’approccio pedagogico alla base del progetto è il Costruzionismo, una teoria proposta da Seymour Papert partendo dal lavoro di Jean Piaget.
L’apprendimento viene visto come una costruzione e ricostruzione di rappresentazioni mentali, più che come una trasmissione di conoscenza. Un apprendimento significativo si verifica con l’utilizzo di materiali manipolativi adeguati, che permettano la realizzazione di attività di costruzione di prodotti significativi (artefatti cognitivi) per lo studente. In questa senso, durante il progetto si è ipotizzato che la tecnologia e gli ambienti innovativi per l’apprendimento, adeguatamente introdotti nel setting didattico, potessero potenziare l’azione di apprendimento. Gli artefatti cognitivi sono stati sia i robot, costruiti e personalizzati dagli studenti, che i programmi preparati all’interno dell’ambiente Lego® Mindstorms® EV3 per la risoluzione dei problemi posti.
In questo lavoro vogliamo ricordare la definizione di robotica educativa:
"Con il termine robotica educativa (in inglese Educational Robotics) si individuano strumenti, processi e metodologie basate sulle teorie costruttiviste, in cui l’apprendimento nasce dal poter costruire un vero e proprio oggetto. L’ideazione, la progettazione, la costruzione, l’assemblaggio e la programmazione di un robot consentono a studenti di tutte le età di poter “imparare a imparare." [7]
Altra metodologia adottata per la realizzazione del progetto è stata quella dell’apprendimento basato sulla risoluzione dei problemi e apprendimento “challenge-based” [8]. All’inizio di ogni lezione è stato proposto un problema o una sfida che gli studenti hanno risolto lavorando in team; cosa che inserisce per merito anche l’apprendimento collaborativo tra le strategie scelte in fase di progettazione dell’attività.
Scopri i servizi di Weturtle
per il PIANO SCUOLA 4.0 del PNRR
Ottieni uno spazio di apprendimento con contenuti didattici per docenti e studenti, dove facilitare lo scambio e favorire la comunità di pratica e dove tenere sotto controllo i progressi della classe e dei docenti.
 Programma
Programma

 Valutazione
Valutazione
Risultati raggiunti
I risultati sono strettamente connessi agli obiettivi precedentemente presentati:
- Costruire un semplice modello matematico rispetto ad un problema posto (inseguire una linea).
- Utilizzare elementi base di programmazione (esecuzione sequenziale, ciclica e condizionata di istruzioni).
- Scoprire e utilizzare gli elementi base della teoria del controllo (feedback o retroazione).
- Comprendere gli algoritmi utilizzati in gran parte dei sistemi automatici (industriali e non).
- Il 100% degli studenti coinvolti (circa 60) è riuscito a risolvere il problema “base”, ossia inseguire la linea, arrivando a costruire l’algoritmo di controllo proporzionale.
- Il 25% degli studenti coinvolti (circa 15) è riuscito a risolvere la sfida finale, combinando creativamente quanto appreso durante il corso.
- Accrescere l’interesse verso le discipline STEM (Science Technology Engineering Maths).
- Migliorare la capacità degli studenti di lavorare in gruppo.
- Accrescere la consapevolezza degli alunni verso i propri processi cognitivi attraverso la valutazione dell’Alternanza.
DOMANDE CHIUSE
Q1- Ho capito le spiegazioni e le istruzioni che mi ha dato l'istruttore
Q2- L'istruttore è stato disponibile e attento alle mie domande e bisogni
Q3- Il metodo usato dall'istruttore è stato coinvolgente
Q4- È stato facile costruire i robot in gruppo
Q5- È stato facile utilizzare i software al computer
Q6- Ho frequentato volentieri le attività del laboratorio
Q7- Il clima in classe è stato sereno
Q8- Il lavoro nel mio gruppo è stato di collaborazione e sostegno
Q9- La mia relazione con uno o più compagni è migliorata
Q10- Ho trovato divertente e appassionante partecipare a questo tipo di alternanza Scuola-Lavoro
Q11- Mi piacerebbe prendere parte ad altri laboratori di Robotica più avanzati
DOMANDE APERTE
Che cosa hai imparato in questo laboratorio?
Qual è la cosa che ti è piaciuta di più di questo laboratorio?
Secondo te c'è stato qualcosa che non è andato bene?
C'è qualcos'altro che avresti voluto fare nel laboratorio?
Abbiamo proposto una scala Likert a 5 punti, attraverso la quale gli studenti hanno potuto manifestare il livello di accordo rispetto alle domande proposte:
1 = per niente
2 = poco
3 = abbastanza
4 = molto
5 = moltissimo
Le domande chiuse sono organizzate attorno ai 3 obiettivi a cui sono legate in questo modo:
- Accrescere l’interesse verso le discipline STEM (Science Technology Engineering Maths). Q1, Q2, Q3, Q6, Q10.
- Migliorare la capacità degli studenti di lavorare in gruppo. Q7, Q8, Q9.
- Accrescere la consapevolezza degli alunni verso i propri processi cognitivi attraverso la valutazione dell’Alternanza. Q4, Q5, Q11.
Il grafico seguente contiene i punteggi (in valore medio) scelti dagli studenti nel compilare il questionario.
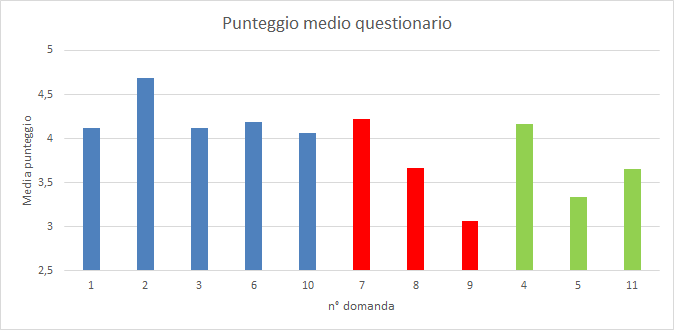
Possiamo concludere che i 3 obiettivi sono stati raggiunti in modo soddisfacente: infatti la media di ogni risposta è > di 3, la soglia minima che ci si era prefissati di raggiungere.
Da migliorare sicuramente il potenziamento del lavoro di squadra, obiettivo che ha ottenuto il punteggio più basso (barre in rosso all’interno del grafico).
 Riferimenti e links
Riferimenti e links
Norbert Wiener e la definizione di retroazione
Vediamo come Norbert Wiener, grandissimo matematico statunitense, nella sua opera "Introduzione alla cibernetica - L'uso umano degli esser umani" ci spiega il concetto di retroazione:
Con retroazione si intende “la proprietà di essere in grado di modificare il futuro comportamento tramite le performance passate”.
“feedback, the property of being able to adjust future conduct by past performance”
In un altro passaggio, troviamo anche questo esempio di funzionamento di un ascensore come applicazione pratica del feedback:
“Se stiamo facendo funzionare un ascensore [Se siamo i progettisti dell’ascensore, NdR], non è sufficiente far aprire le porte esterne [in un qualsiasi momento, NdR] perché gli ordini che abbiamo dato dovrebbero far trovare l’ascensore davanti a quella porta [la porta dell’edificio, NdR] nel momento in cui le facciamo aprire. È importante che l’apertura delle porte sia dipendente dal fatto che l’ascensore sia realmente alla porta dell’edificio; diversamente se qualcosa può averlo trattenuto, il passeggero potrebbe cadere nella tromba. Questo controllo di una macchina sulla base dello stato attuale piuttosto che di quello previsto è conosciuto come retroazione […]”
La proposta di Seymour Papert
Una possibile attività di questo tipo venne proposta anche da Seymour Papert, in “Teaching Children Thinking”.
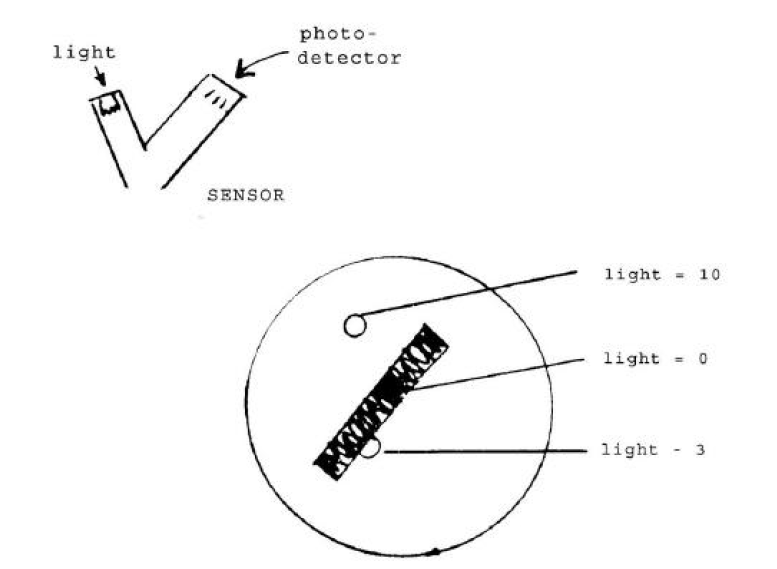
Nell’immagine seguente, si vede come il “robot veicolo” utilizzato da Papert e caratterizzato da un sensore di luce riflessa (emettitore e ricevitore) posizionato nei pressi di una linea nera, rilevi un valore maggiore (light = 10) se interamente puntato sul bianco, un valore intermedio se puntato a metà tra bianco e nero (light = 3), un valore basso se puntato interamente sul nero (light = 0).
Papert nel suo articolo utilizza queste immagini per spiegare il problema:

Per far sì che il robot insegua la linea Papert propone che lo studente implementi l’idea del feed-back (o controllo in retroazione), seguendo un modello di questo tipo:
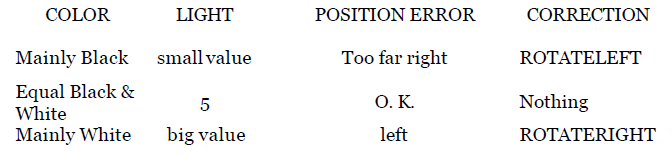
E arrivando ad una procedura semplice come la seguente:
TO WALK
IF LIGHT < 4 ROTATELEFT
IF LIGHT > 6 ROTATERIGHT
FORWARD 1
WALK
END.
(Se la luce rilevata è < 4, gira a sinistra
Se la luce rilevata è > 6, gira a destra
Vai avanti di 1
….)
Si parla di robot che seguono una linea anche in “La fabbrica dei robot” di Augusto Chioccariello, Stefania Manca, Luigi Sarti, ed in questo caso l’attività è proposta addirittura per bambini della scuola dell’infanzia, come primo approccio alla robotica.
[1] http://www.diag.uniroma1.it/~deluca/rob1/17_PianifContrRobMob.pdf
[2] https://www.youtube.com/watch?v=sJ-FXGD5iJo
[3] https://www.youtube.com/watch?v=_Tdu2H1HHIA
[4] https://www.youtube.com/watch?v=FHDMN0gnGtA
[5] https://goo.gl/D2MG2r
[6] https://goo.gl/htXLUK
Una versione estesa dell’articolo (con un’analisi maggiormente approfondita dei dati) è stata pubblicata sulla rivista Mondo Digitale.
[7] Definizione proposta da Emanuele Micheli di Scuola di Robotica in Human Centered Robotic Design.
[8] http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7971875
[9] https://shop.lego.com/en-US/EV3-Color-Sensor-45506
[10] Robotcar e il moto rettilineo
[11] Corso Robotica a scuola con LEGO Mindstorms EV3
LEGO, il logo LEGO e MINDSTORMS sono marchi e /o copyright di LEGO Group. © 2018 The LEGO Group. Tutti i diritti riservati.

Quest'opera è distribuita con Licenza Creative Commons Attribuzione - Non commerciale - Condividi allo stesso modo 4.0 Italia.
AUTORE

Lorenzo Cesaretti
Ho una laurea in Ingegneria Informatica e dell’Automazione all'Università Politecnica delle Marche e una grande passione per la didattica. Per 3 anni ha lavorato come progettista software...
AUTORE
Lorenzo Cesaretti
Ho una laurea in Ingegneria Informatica e dell’Automazione all'Università Politecnica delle Marche e una grande passione per la didattica. Per 3 anni ha lavorato come progettista software...
Scopri i corsi di formazione di WeTurtle
Scelto
per te