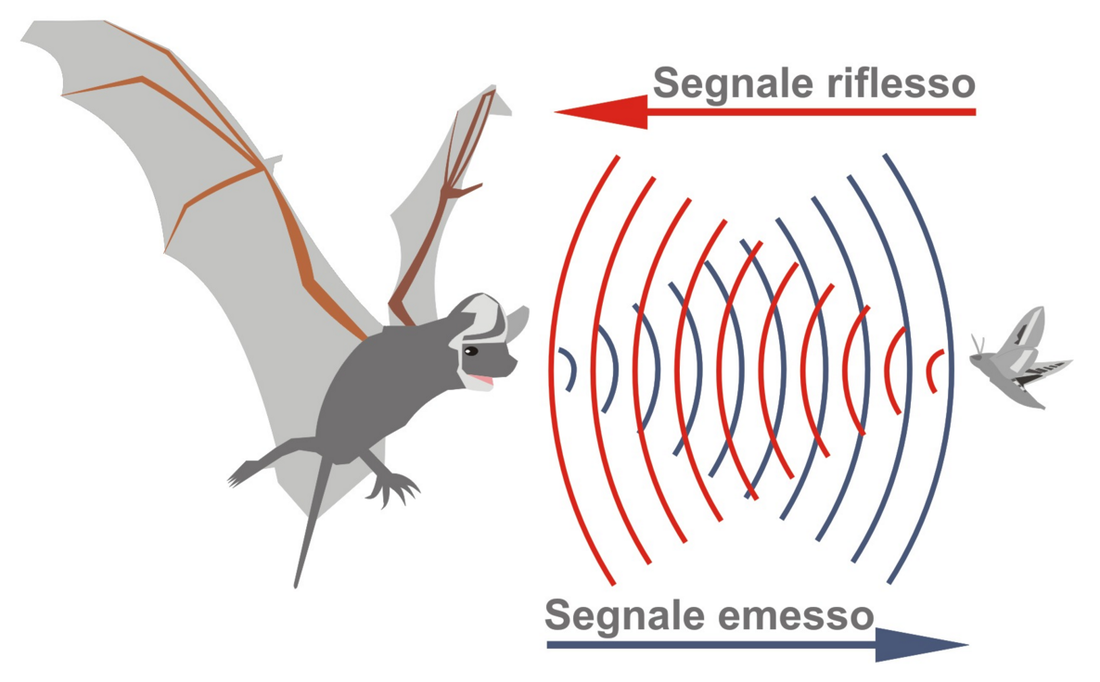
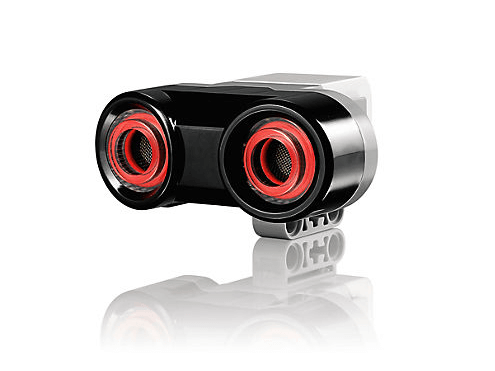
Il sensore ad ultrasuoni può essere utilizzato esclusivamente in
modalità di misura, tuttavia, può essere programmato con differenti linguaggi di programmazione. In particolare, si può utilizzare il linguaggio di programmazione a
blocchi icone o quello a
blocchi parole.
Di seguito, sono presentati alcuni
esempi di codice ed
esperimenti che illustrano le diverse possibilità di utilizzo del sensore ad ultrasuoni, al fine di fornire una conoscenza completa ed approfondita delle sue potenzialità.
In questo tutorial utilizzeremo il linguaggio di programmazione
blocchi di parole
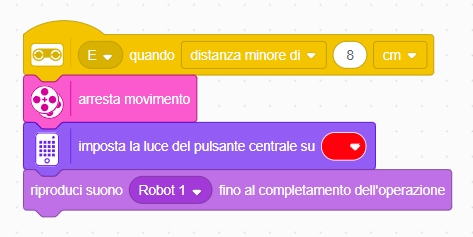
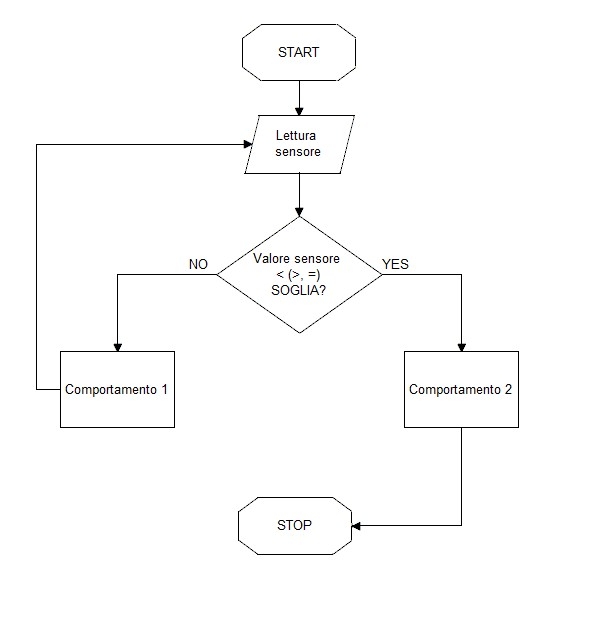
- Esempio 1: Arrestarsi ad una certa distanza prima di un ostacolo
Questo programma (
vedi figura 4) consente al robot di muoversi in avanti finché il sensore ad ultrasuoni, rivolto in avanti, non rileva un oggetto a meno di 8 centimetri. In seguito, il robot si arresta e il pulsante centrale cambia colore in rosso, mentre viene riprodotto il suono "robot 1".
Il programma utilizza due blocchi della categoria Eventi il primo “
Quando distanza minore di" per attendere che la distanza rilevata diventi inferiore a 8 centimetri e arrestare il movimento del robot.
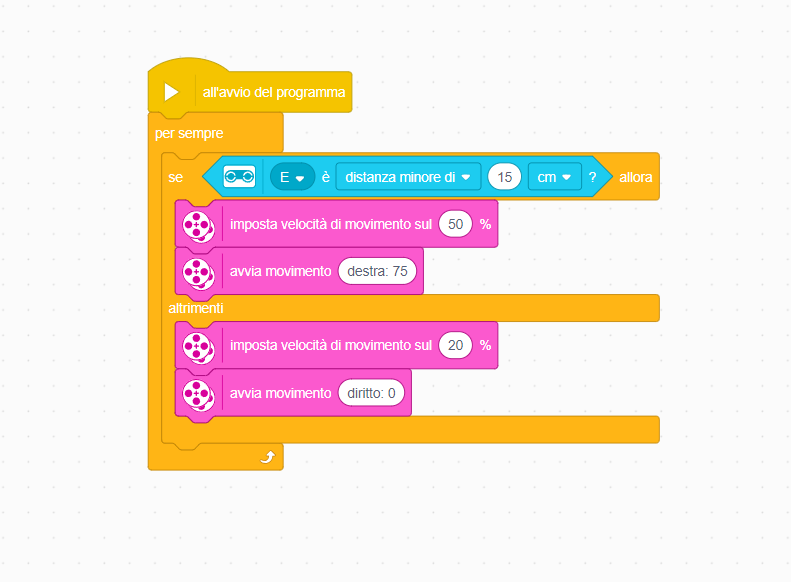
il secondo evento chiamato “
all’avvio del programma” per impostare i motori di movimento sulle porte A+B è dare il movimento lineare a una velocità dei motori del 50%.





 Tempo di lettura/visione: 10 min
Tempo di lettura/visione: 10 min