LEZIONI E FORMAZIONE DAI DOCENTI PER I DOCENTI
Scopri WeTurtle, la community di educatori dove trovare e condividere risorse innovative
Moto uniformemente accelerato con Lego® Mindstorms® EV3
 Tempi
Tempi
Tempo stimato per la lezione in classe: 2.00 h
 Strumenti
Strumenti
- kit Lego® Mindstorms® EV3 Education
- Pc portatili
- Software Lego® Mindstorms® EV3 Education
- Smartphone per la registrazione di video da utilizzare nella documentazione progettuale
- Microsoft Word ed Excel (o simili) per la raccolta e l’analisi dei dati
Registrati a WeTurtle per accedere ai vantaggi, è gratis!
La community di docenti e educatori ti offre:

Il corso gratuito "Collaborare a scuola con il digitale"
Un'area personalizzata con i tuoi contenuti preferiti
Una lezione di prova gratuita per ogni corso online
Dirette ed eventi dedicati agli utenti iscritti
 Linee guida delle attività
Linee guida delle attività
Introduzione
Attraverso questo esperimento si intende verificare le leggi del moto uniformemente accelerato attraverso l’utilizzo di un robot Lego® Mindstorms® EV3 Education modello Educator Vehicle. Per implementare questo progetto noi studenti abbiamo raccolto dati grazie ai sensori del robot, e li abbiamo analizzati, graficati e verificati attraverso Excel.
Breve richiamo teorico
Il moto uniformemente accelerato è il moto di un corpo che si muove mantenendo la propria accelerazione costante. Le formule da noi utilizzate sono state:

dove:
Svolgimento dell'esperimento
Aprire il programma Lego Mindstorms EV3 Education e realizzare la sequenza di seguito:

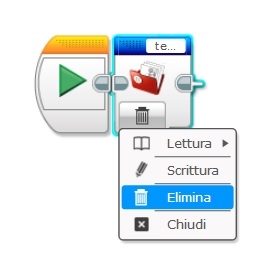
I primi 3 blocchi servono ad azzerare i file ("tempo" e "spazio") e ad azzerare il timer ogni volta che si ricomincia l'esperimento:
- il blocco blu si chiama Accesso ai file (categoria Avanzate) ed è impostato in modalità "Elimina"
- il blocco giallo si chiama Timer (categoria Sensori) ed è impostato in modalità "Reset"

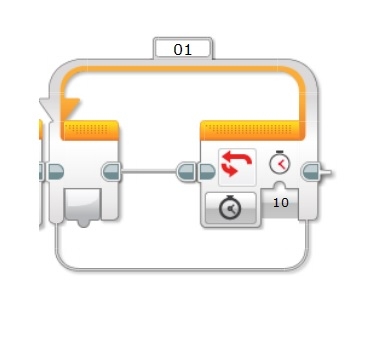
Attraverso il blocco Ciclo (impostato in modalità Tempo) abbiamo avuto la possibilità di decidere la durata dell'esperimento (10 secondi): la sequenza inserita all'interno di questo blocco infatti viene ripetuta per la durata selezionata.
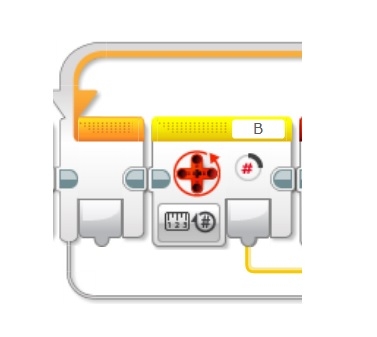
Il seguente blocco (denominato "Rotazione Motore", il primo blocco giallo inserito all'interno del Ciclo) rappresenta un encoder cioè un dispositivo elettromeccanico in grado di convertire la posizione o il moto angolare in un codice digitale. Questo blocco (impostato in modalità Misurazione, Rotazioni) serve a misurare la rotazione effettuata dal motore, e quindi conoscendo la circonferenza della ruota del robot questa informazione potrebbe essere utilizzata per calcolare lo spazio percorso dal veicolo.
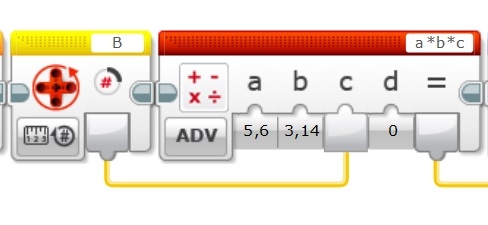
Con il blocco matematico (denominato Funzioni Matematiche, in modalità Avanzata, nella categoria Operazioni dati) siamo in grado di calcolare lo spazio percorso dal robot moltiplicando tra loro il diametro della ruota (valore a), π (valore b) e il valore che ci ha fornito il comando precedente (valore c).
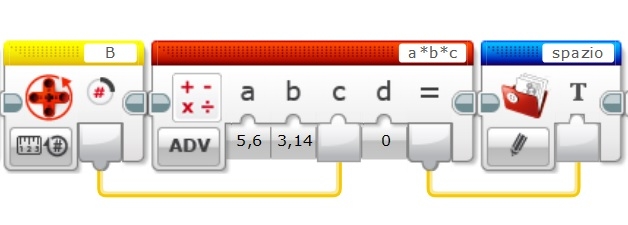
Infine, la distanza percorsa dal robot ottenuta grazie al calcolo precedente viene scritta all'interno di un file che abbiamo chiamato "spazio" (blocco Accesso ai file, in modalità Scrittura). In questo modo quindi stiamo salvando i dati relativi allo spazio del moto accelerato che vogliamo studiare.
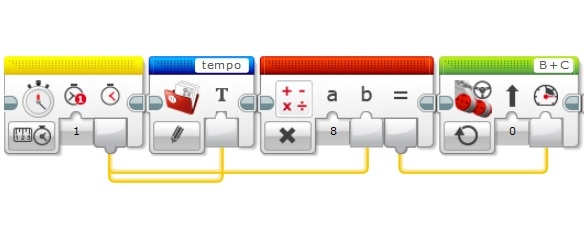
Passiamo ora alla registrazione del tempo all'interno di un file: grazie al blocco Timer (giallo) in modalità Misurazione - Tempo riusciamo a misurare in quale istante di tempo è stata fatta la misura di spazio mostrata nei blocchi precedenti; con il blocco Accesso ai file in modalità Scrittura questa informazione viese salvata all'interno del file "Tempo"; infine abbiamo un ulteriore blocco matematico (in modalità Moltiplicazione) con il quale, moltiplicando il valore del tempo registrato dal timer per l’accelerazione da noi impostata (nell'immagine sottostante 8), troviamo la velocità del robot che deve essere impostata all'interno del blocco Movimento con controllo sterzo, in modalità On.
Quanto appena costruito ci permette di modificare la velocità del robot, con il passare del tempo, in modo proporzionale al valore inserito all'interno del blocco Moltiplicazione. Purtroppo però il valore di velocità impostato è una percentuale rispetto alla velocità massima del robot, quindi non è associato direttamente ad un valore in centimetri / secondi: di conseguenza anche il valore di accelerazione impostato non è in centimetri / secondi ^2.
Nella schermata del programma, sono presenti in basso a destra le funzioni nella figura sottostante. Una volta collegato l’apposito cavo USB al computer, è possibile cliccare il comando evidenziato in foto per trasferire la sequenza al robot. Successivamente, è necessario scollegare il robot dal computer e selezionare direttamente dal robot il progetto a cui avete lavorato per azionarlo.

Nel video seguente si vede il robot che esegue l'esperimento:
Dopo che il robot è stato azionato e ha compiuto il moto, i dati registrati (tempo e spazio), grazie ai comandi nella sequenza, possono essere scaricati sul computer (come viene spiegato nella parte finale di questo tutorial) e salvati su un documento di testo.
Successivamente i dati vengono copiati manualmente sul programma Excel e analizzati graficamente.
Se l’esperimento è stato eseguito correttamente si otterrà il grafico spazio-tempo di un ramo di parabola (infatti la legge oraria del moto uniformemente accelerato è un'equazione di secondo grado).
Nel nostro caso specifico sono stati analizzati i moti con due accelerazioni differenti (impostate a 8 e 3) e sono stati confrontati nel seguente grafico.
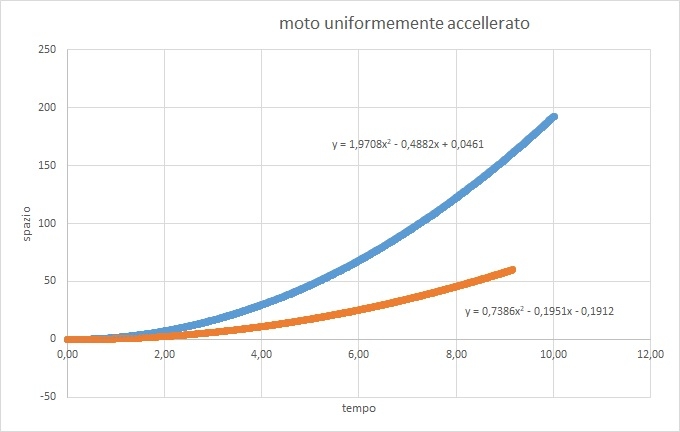
Dal grafico di Excel si può notare che la pendenza della parabola che rappresenta il moto ottenuto con accelerazione pari a 8 è maggiore rispetto alla pendenza della parabola ottenuta impostando accelerazione pari a 3.
Conclusioni
Attraverso i grafici abbiamo verificato la validità delle leggi del moto uniformemente accelerato compiuto dal robot, consolidando le conoscenze teoriche dell’argomento trattato. Inoltre, abbiamo anche acquisito delle conoscenze base nel campo della robotica.
Scopri i servizi di Weturtle
per il PIANO SCUOLA 4.0 del PNRR
Ottieni uno spazio di apprendimento con contenuti didattici per docenti e studenti, dove facilitare lo scambio e favorire la comunità di pratica e dove tenere sotto controllo i progressi della classe e dei docenti.
 Riferimenti e links
Riferimenti e links
Ti interessa approfondire il kit Lego® Mindstorms® EV3 Education? A questo link trovi un corso online gratuito e certificato che potrai seguire quando e come vuoi!
LEGO, il logo LEGO e MINDSTORMS sono marchi e /o copyright di LEGO Group. © 2020 The LEGO Group. Tutti i diritti riservati.
Vuoi leggere la lezione quando vuoi, anche offline?

Quest'opera è distribuita con Licenza Creative Commons Attribuzione - Non commerciale - Condividi allo stesso modo 4.0 Italia.
AUTORE

Liceo Recanati
AUTORE
Liceo Recanati
Scopri i corsi di formazione di WeTurtle