Tempo di lettura/visione: 4 min
Tempo di lettura/visione: 4 min
 Consigliato per la fascia d'età: SECONDARIA II GRADO
Consigliato per la fascia d'età: SECONDARIA II GRADO
 Adattabile alla fascia d'età: SECONDARIA I GRADO
Adattabile alla fascia d'età: SECONDARIA I GRADO

Introduzione
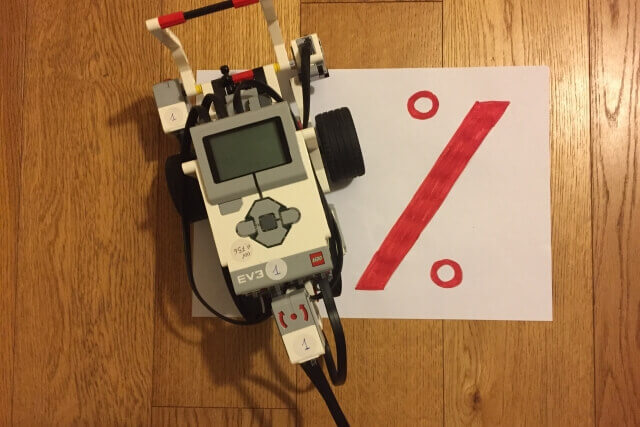
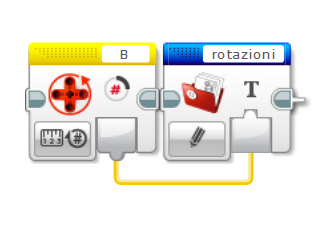
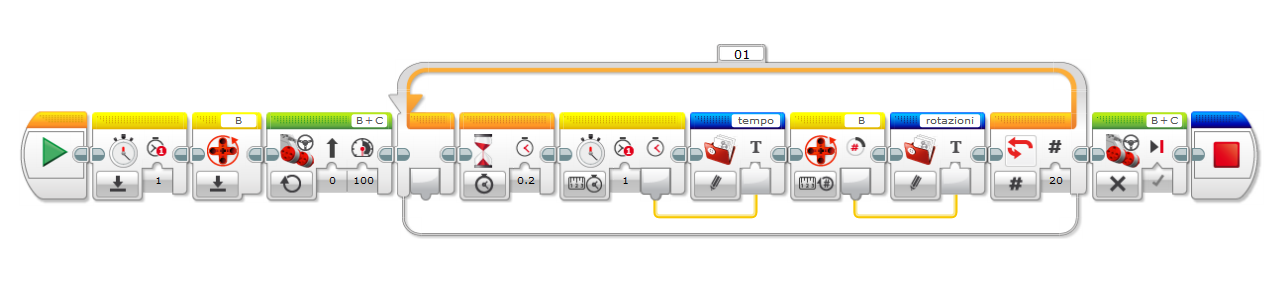
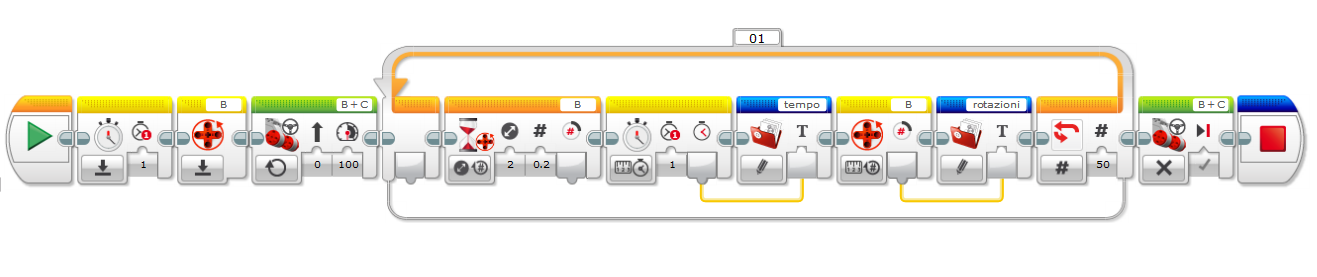
Questo progetto vuole mostrare il possibile utilizzo di un robot mobile in un’esperienza laboratoriale di studio del moto rettilineo di un corpo, con un focus particolare sulla costruzione del grafico spazio-tempo e sulla legge oraria del moto.
Gli studenti coinvolti nelle attività di seguito proposte avranno modo di acquisire dati grazie ai sensori del robot e al loro smartphone (decidendo come impostare alcuni esperimenti per l’analisi del moto del robot), creare i grafici dei dati raccolti e formalizzare le relazioni trovate sperimentalmente.
Ti interessa approfondire il kit Lego® Mindstorms® EV3 Education? A questo link trovi un corso online certificato che potrai seguire quando e come vuoi!






 Obiettivi e Competenze
Obiettivi e Competenze Strumenti
Strumenti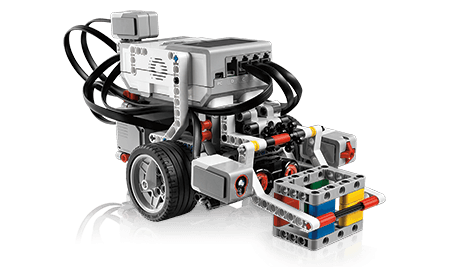
 Metodologia didattica
Metodologia didattica
 Linee guida delle attività
Linee guida delle attività
 Risultati attesi
Risultati attesi Riferimenti e links
Riferimenti e links