Giorni 7-8
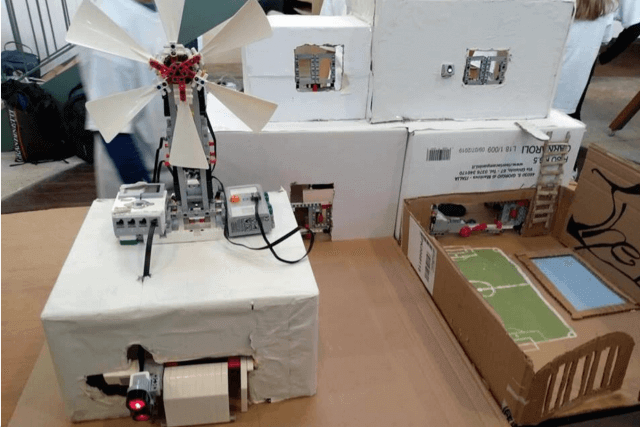
Nel settimo incontro sono state messe a punto le progettazioni su carta di ogni gruppo, e successivamente si è poi passati alla presentazione del lavoro dei team: un momento di confronto necessario per poi arrivare a scegliere quali invenzioni costruire e presentare nella mostra finale. Alla fine gli studenti, di comune accordo, hanno scelto di realizzare:
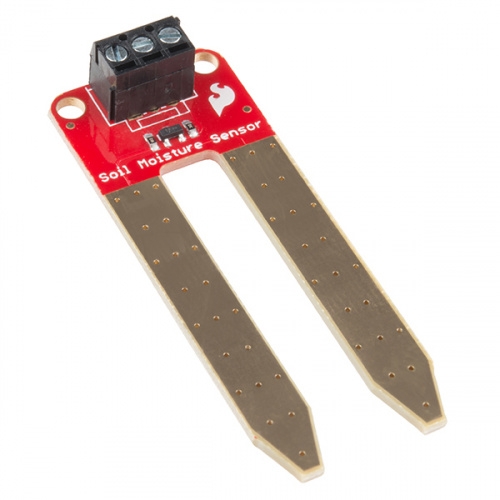
- il sistema di innaffiamento automatico, caratterizzato da una pompa per l’acqua e da un sensore di umidità capace di comunicare con la pompa; questo sistema intelligente serve a risparmiare acqua, determinando l’avvio della pompa solo con il terreno secco (rilevato dal sensore);
- il sistema di illuminazione automatico, caratterizzato dai led (in sostituzione di una lampada) e da un sensore di luce; questo sistema intelligente serve a consentire alla pianta di avere luce a disposizione anche in caso di mancanza di luce naturale;
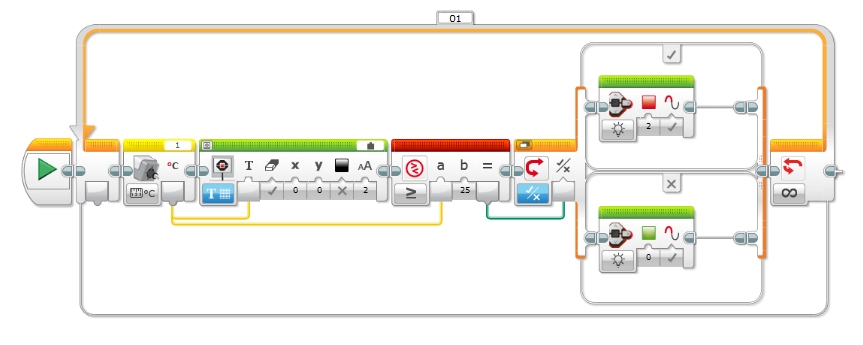
- il sistema di rilevamento della temperatura, caratterizzato da un sensore di temperatura e da un display; questo sistema intelligente vuole rendere l’informazione “temperatura del terreno” sempre disponibile al contadino.
- il robot “scacciainsetti”, un robot capace di girare tra le piante e scacciare mosche e scarafaggi.
I gruppi, con l’aiuto del tutor e dei docenti, si sono suddivisi i compiti per arrivare a costruire ognuno degli elementi ideati.
È stato quindi dedicato tempo sia alla costruzione che alla programmazione degli artefatti robotici, svolte in modo autonomo dagli studenti con l’intervento dei tutor solo in caso di estrema necessità.
Di seguito descriviamo in modo approfondito gli artefatti realizzati.
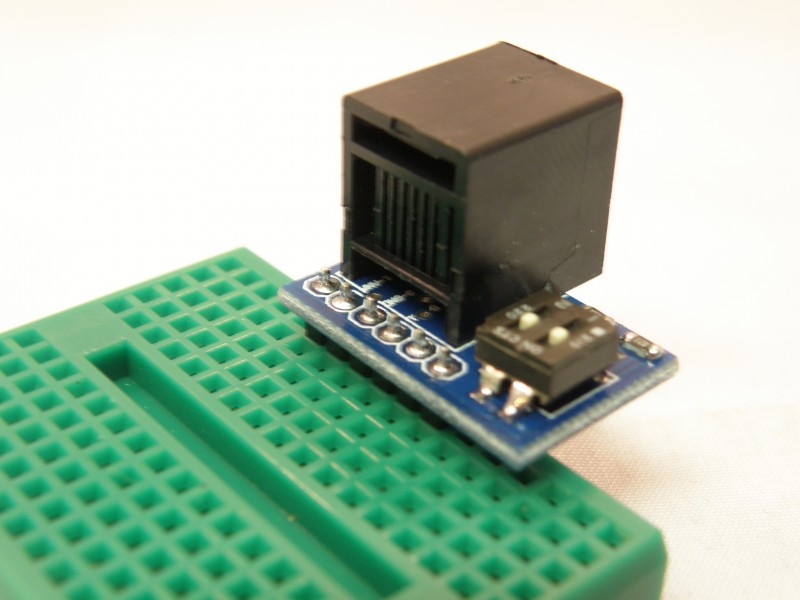
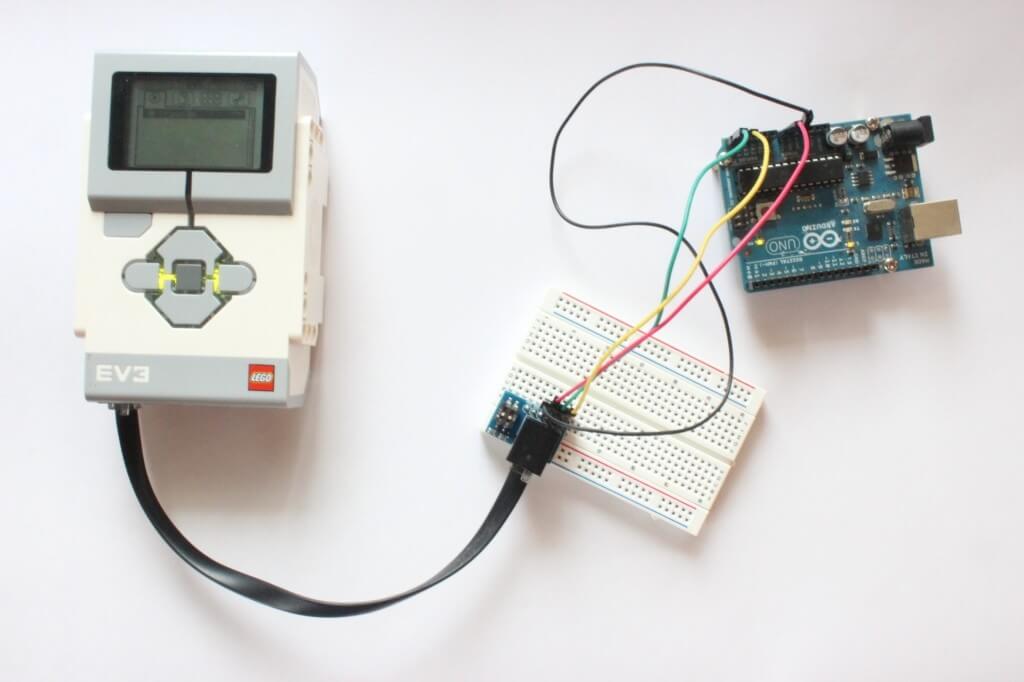
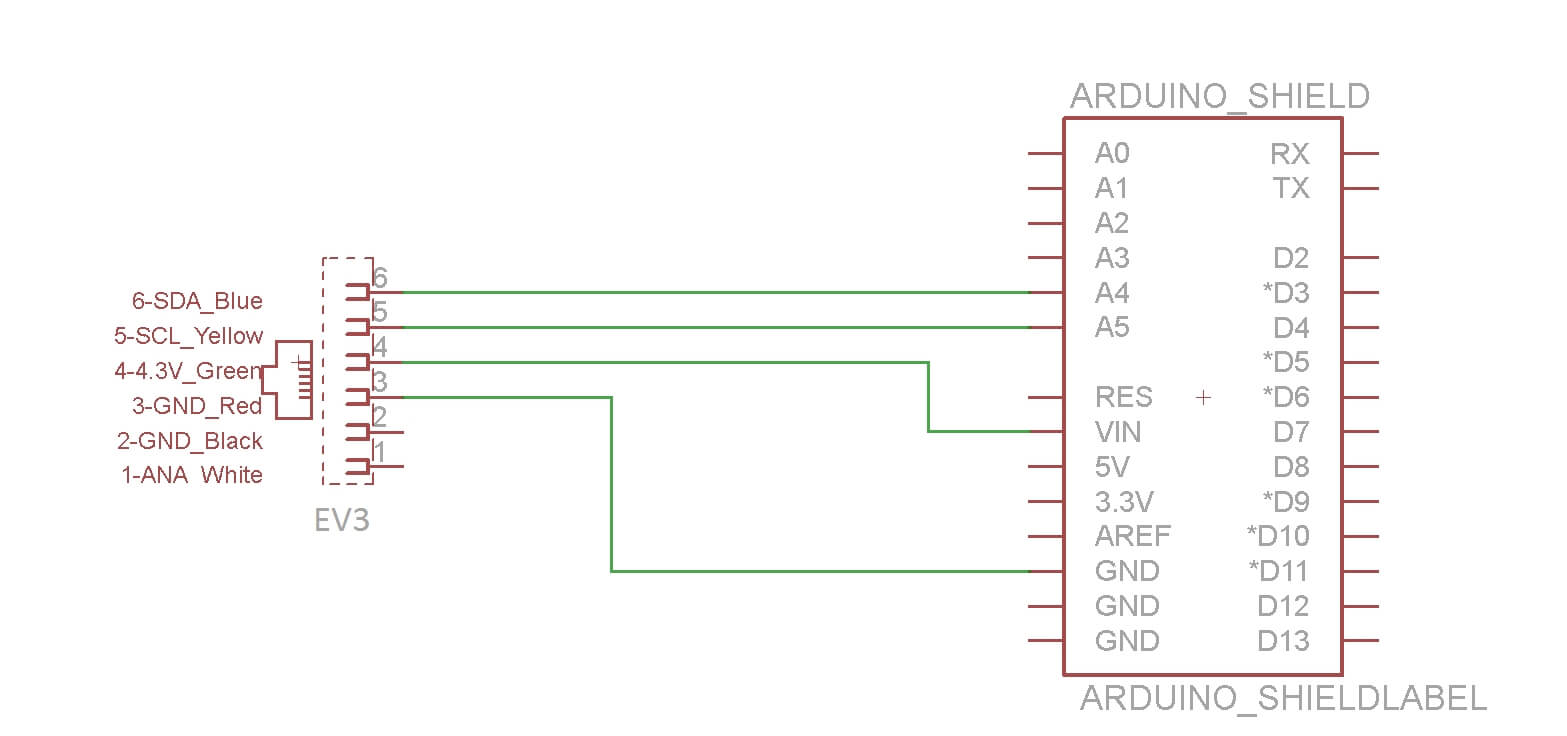
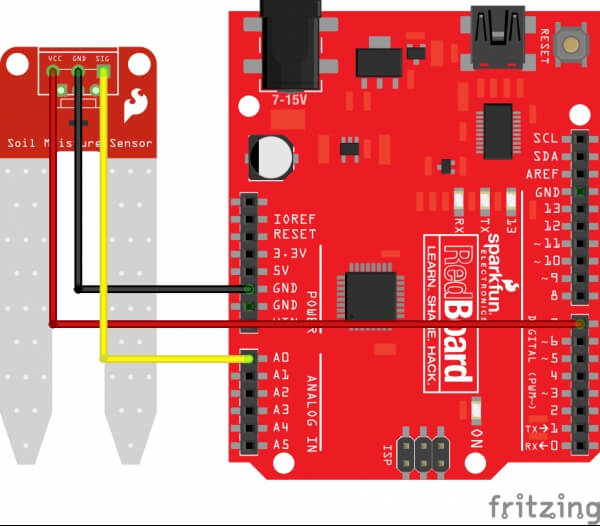
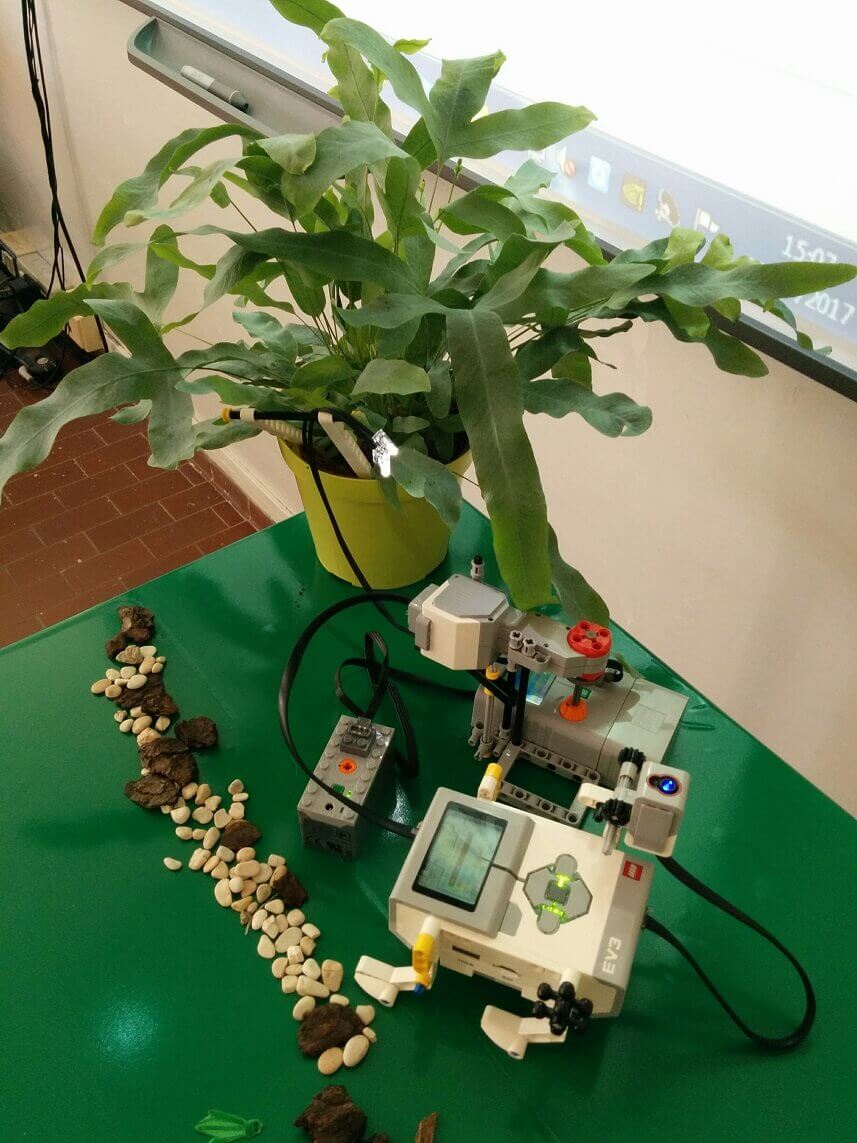
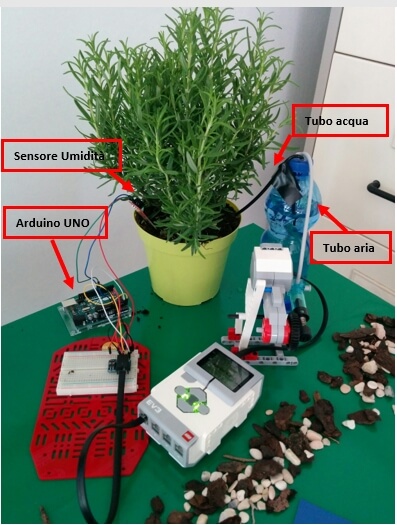
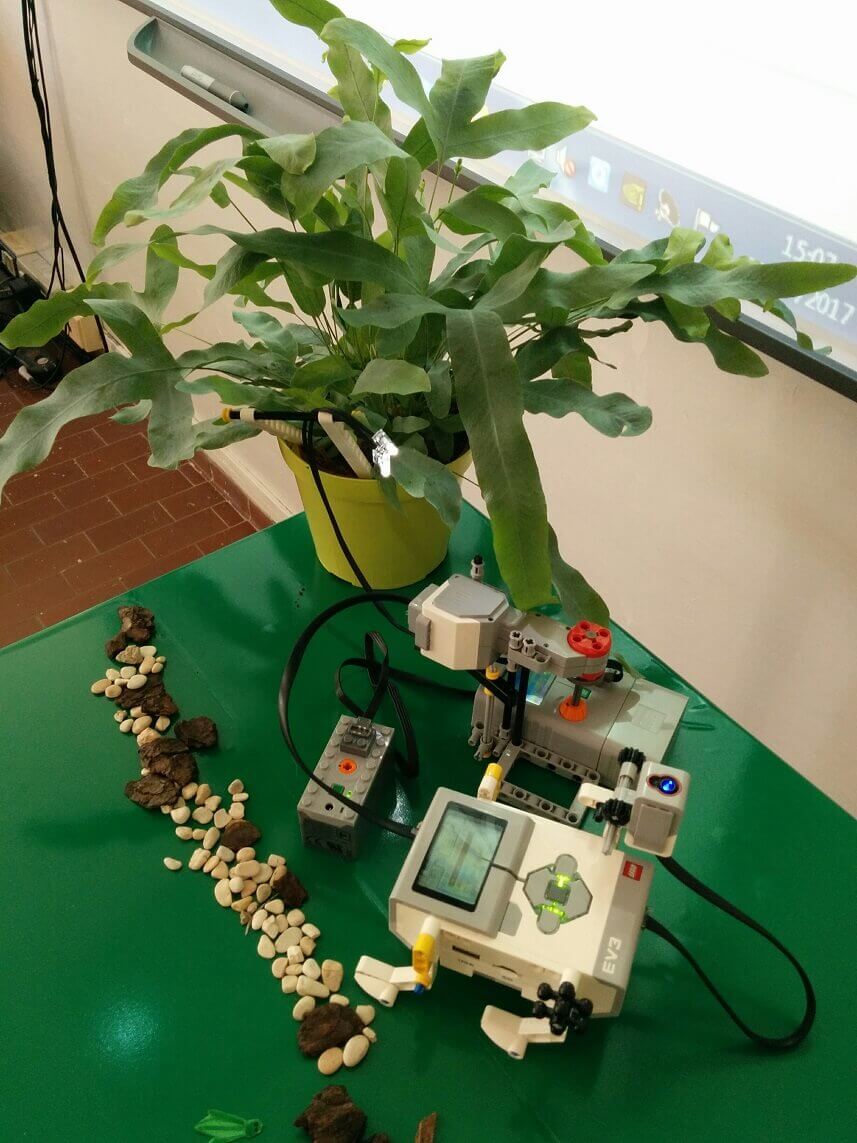
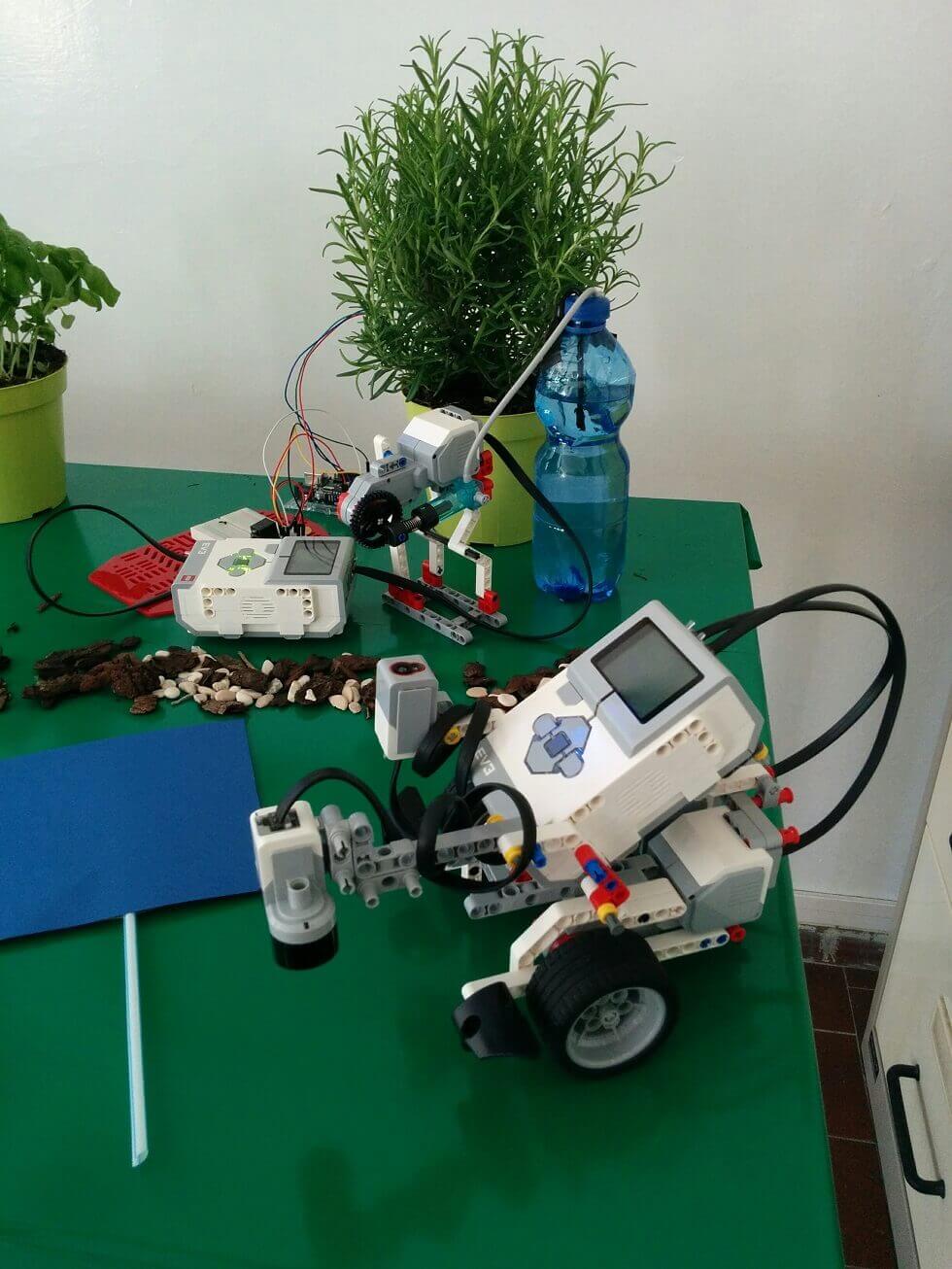
Il sistema di innaffiamento automaticoIl sistema di innaffiamento automatico è stato realizzato collegando ad un brick EV3 la scheda Arduino UNO (come spiegato nella sezione Strumenti), responsabile della comunicazione con il sensore di umidità, e il Large Motor, elemento centrale del meccanismo che pompava aria all’interno di una bottiglia di acqua (grazie ad un tubo di plastica), così da causare la fuoriuscita di acqua da un altro tubo sempre all’interno della bottiglia. I due tubi sono stati fatti passare attraverso due fori nel tappo, resi stagni con del silicone (figura sotto a sinistra).
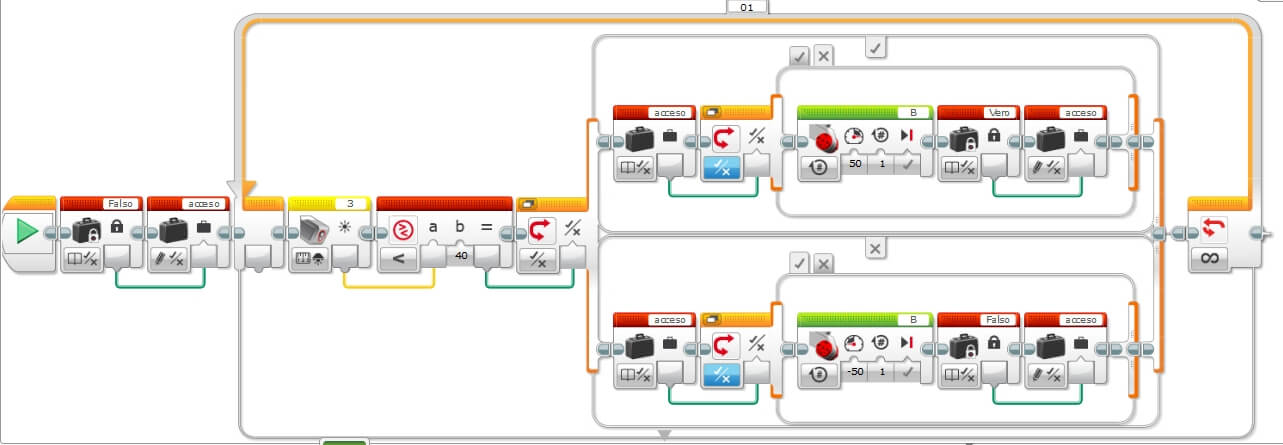
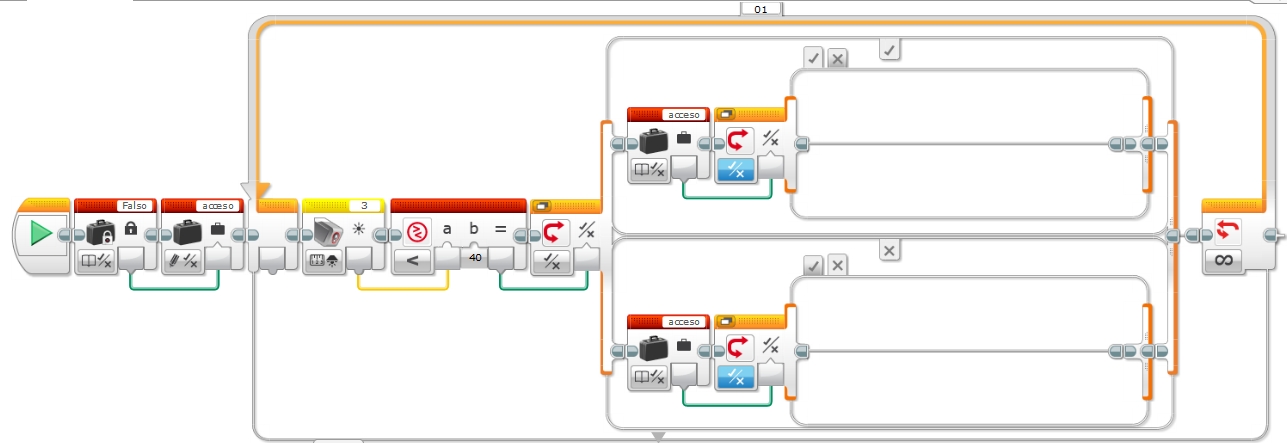
Nella sequenza seguente (immagine a destra) si può osservare la logica di funzionamento del sistema: se il valore di umidità è minore di 50 (terreno secco) vengono accesi i motori, altrimenti i motori rimangono spenti.
Il blocco utilizzato per acquisire la misura dal sensore (il blocco giallo) fa parte della libreria Dexter (scaricabile a questo
link, seguendo il tutorial). Ai partecipanti è stato presentato come blocco per acquisire dati dal sensore di umidità, senza entrare in dettagli tecnici troppo complessi.






 Tempo di lettura/visione: 18 min
Tempo di lettura/visione: 18 min Consigliato per la fascia d'età: SECONDARIA I GRADO
Consigliato per la fascia d'età: SECONDARIA I GRADO Adattabile alla fascia d'età: PRIMARIA
Adattabile alla fascia d'età: PRIMARIA
 Obiettivi e Competenze
Obiettivi e Competenze Strumenti
Strumenti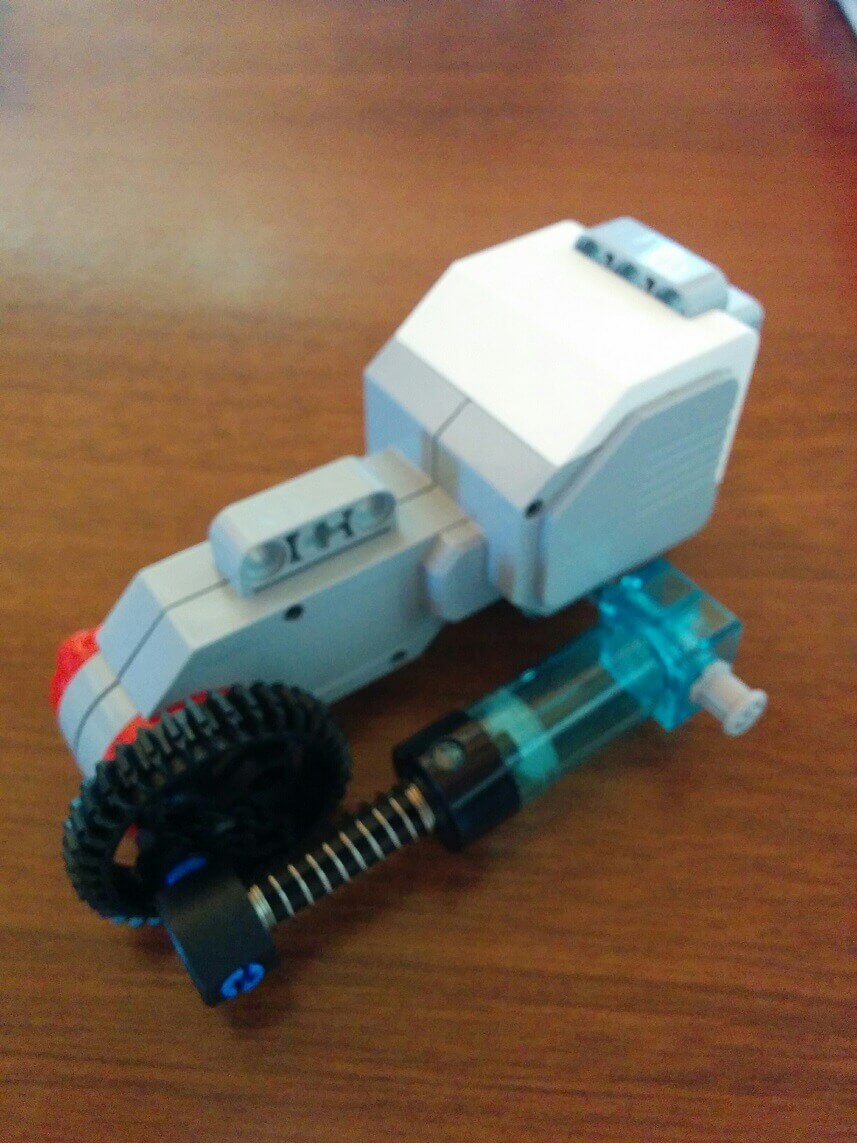



 Metodologia didattica
Metodologia didattica

 Linee guida delle attività
Linee guida delle attività



 Risultati attesi
Risultati attesi Riferimenti e links
Riferimenti e links