Tempo di lettura/visione: 9 min
Tempo di lettura/visione: 9 min
Classificazione ed esempi di Robotica Educativa nelle esperienze dell'Università Politecnica delle Marche
L'autore dell'intervento di seguito proposto è David Scaradozzi, ricercatore presso l'Università Politecnica delle Marche, da anni interessato all'introduzione della Robotica Educativa a scuola e autore di diversi paper sull'argomento; l'intervento è stato proposto nell'ambito del convegno "Quando i robot si costruiscono a scuola. Approcci metodologici a supporto della Robotica", organizzato da INDIRE.

Nell’ultima decade numerose sono state le esperienze che hanno visto l’introduzione di robot e concetti di robotica nelle scuole di ogni ordine e grado. Al fine di creare curriculi o esperienze di valore è necessario procedere a fasi di verifica e valutazione non solo dei discenti ma anche dei progetti stessi. Introdurre robot o introdurre la robotica sono talvolta indice di fraintendimenti da parte di valutatori e progettisti. Il relatore intende presentare le sue esperienze decennali nell’introduzione della robotica come materia curriculare e non, nel territorio, e presentare una possibile caratterizzazione delle esperienze per procedere alla valutazione.
Classificazione delle attività nell'ambito della Robotica Educativa
Le numerose esperienze di Robotica Educativa maturate dall’Università Politecnica delle Marche a partire dal 2010, in collaborazione con numerosi Istituti Comprensivi e Istituti di Istruzione Superiore in diverse regioni italiane, hanno fatto emergere la necessità di creare una classificazione di questi progetti. In questo modo si facilita la possibilità di confronti tra progetti differenti, fondamentale per poter comparare i risultati in un ambito in evoluzione come la Robotica Educativa.
Una prima doverosa differenziazione va fatta rispetto all’utilizzo dei robot in ambito educativo, infatti si possono individuare 3 definizioni:
Robotica assistiva (Assistive Robotics): robot che assistono studenti con disabilità fisiche in classe (ad esempio [1]); in questo caso il robot sopperisce ad una difficoltà fisica dell’alunno e solitamente si trova a contatto con l’utente fruitore.
Robotica socialmente assistiva (Socially Assistive Robotics): robot che aiutano studenti con difficoltà o problematiche sociali; questi robot quindi attuano un’interazione sociale con lo studente, come ad esempio troviamo in [2, 3, 4]; in questo caso però lo studente non è protagonista nella costruzione di un artefatto robotico, ma si trova ad interagire con un robot in ambito educativo.
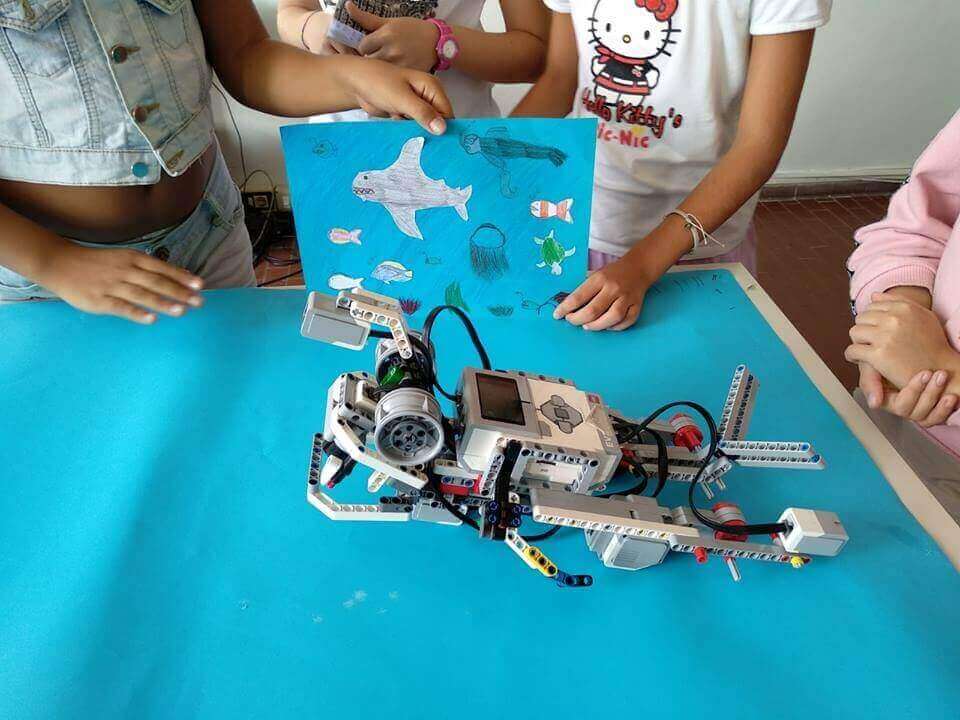
Robotica educativa (Educational Robotics): lo studente, protagonista nel processo di apprendimento, progetta, costruisce e programma robot; in questo modo avviene una costruzione di conoscenze legate alla Robotica e ad altre discipline scelte dal progettista didattico, insegnante o esperto esterno.
In ottica di standardizzazione e possibilità di confronto tra i risultati di progetti diversi, le attività che ricadono all’interno dell’ambito della Robotica Educativa potrebbero essere ulteriormente classificate in base a:
Ambiente: All’interno della classe o all’esterno della classe; l’ambiente di apprendimento in cui si trova il discente, che può essere formale (ambiente scolastico) o informale (musei, centri per camp estivi etc.) potrebbe influire su come lo studente percepisce l’attività di Robotica Educativa.
Tipo di attività: Curricolare o non curricolare; si hanno tanti esempi di percorsi di Robotica Educativa introdotti a scuola all’interno dell’attività curricolare quotidiana, o extracurricolare (progetti pomeridiani, progetti di Alternanza Scuola – Lavoro etc.).
Registrati a WeTurtle per accedere ai vantaggi, è gratis!
La community di docenti e educatori ti offre:

Il corso gratuito "Collaborare a scuola con il digitale"
Un'area personalizzata con i tuoi contenuti preferiti
Una lezione di prova gratuita per ogni corso online
Dirette ed eventi dedicati agli utenti iscritti
Si propone un’ultima classificazione per quanto riguarda la valutazione degli apprendimenti degli studenti.
- Offline: metodologia standard e validata in letteratura; attraverso questionari (risposta chiusa / risposta aperta), rubriche, griglie di valutazione, osservazioni in itinere del docente.
- Online: acquisizione di dati tramite sensori o tramite i tool di Robotica Educativa, così da monitorare passo-passo gli apprendimenti dello studente. Sono stati fatti tentativi in passato nell’utilizzo di queste tecniche in attività di programmazione informatica [5] o attività di progettazione meccanica [6], quindi sarebbe interessante approfondire tecniche di questo tipo anche nell’ambito della Robotica Educativa. Queste tecniche sono di difficile implementazione e necessitano validazione, ma sono sicuramente promettenti per il futuro del mondo dell’educazione.
Queste due modalità di valutazione non sono opposte l’una all’altra, ma potrebbero integrarsi ed essere utilizzate nei prossimi anni in combinazione, così da permettere una conferma scientifica dei benefici ipotizzati della Robotica Educativa.
"Robotica a scuola": il primo esempio di Robotica curricolare in Italia
Nel 2010 grazie alla collaborazione con l’Università Politecnica delle Marche, l’Istituto Comprensivo Largo Cocconi di Roma, per la prima volta in Italia, ha introdotto la Robotica come disciplina curricolare per una classe prima, che nel 2015 ha completato il ciclo di scuola primaria. Questo progetto, intitolato “Robotica a Scuola”, oltre a essere stato presentato in varie pubblicazioni internazionali [7, 8, 9] ha avuto anche il riconoscimento come miglior progetto innovativo, ricevendo la medaglia della Presidenza della Repubblica nell’ambito della Global Junior Challenge dell’ottobre 2012 [10]. Il progetto, coordinato dal prof. Scaradozzi (Dipartimento di Ingegneria dell’Informazione) e dall’insegnante Valzano (IC Largo Cocconi), per la sua rilevanza ha attirato l’attenzione dei media nazionali, come ad esempio il TG2 [11].
Perché inserire la Robotica come disciplina curricolare?
Si è scelto di mettere a sistema la Robotica Educativa, intesa come metodologia di lavoro, dedicandole 3 ore a settimana dalla prima alla quinta così da far considerare normale agli studenti questa modalità laboratoriale ed “hands on”, anziché come un’attività extra-curricolare e insolita. La Robotica si è innestata quindi come disciplina funzionale alle discipline curriculari, in quanto va a sviluppare la logica, la concentrazione e l’attenzione, facoltà che si impegnano nel perseguire le competenze fondamentali e gli obiettivi formativi di tutte le discipline del curricolo scolastico.
Durante le ore di Robotica gli studenti possono costruire artefatti significativi (sia hardware che software): si mette in pratica quindi una didattica costruzionista (come teorizzato da Papert), avente come punto cardine la costruzione di conoscenza facilitata dalla la costruzione “con le mani” [12].
Le attività settimanali sono state fortemente legate alle STEM (Scienza, Tecnologia, Ingegneria, Matematica), ma anche connesse all’Italiano e all’Arte; oltre a questo però si è lavorato sui concetti fondamentali e sulle competenze base della Robotica:
- Riflettere sulla definizione di robot, e sulle differenze con la macchina e l’essere umano;
- Riflettere sui concetti della Robotica con l’introduzione delle opere di Asimov e le 3 leggi della Robotica;
- Studiare i motori ed i sensori, comparandoli con gli apparati dell’essere umano;
- Saper utilizzare gli elementi base della programmazione di un robot (esecuzione sequenziale, ciclica, condizionata di istruzioni);
- Saper acquisire dati dai sensori del robot e utilizzarli per modificare il comportamento del robot tramite gli attuatori;
- Progettare robot capaci di interagire con l’ambiente circostante;
- Acquisire la capacità di attribuire scopi coerenti a robot semplici e complessi;
- Acquisire la capacità di progettare e costruire robot capaci di compiere specifici task.
Per poter utilizzare la Robotica come facilitatore dell’apprendimento di altre discipline, gli studenti devono poter padroneggiare e utilizzare con consapevolezza gli elementi principali della Robotica. Per questo motivo si è scelto di lavorare con continuità durante i 5 anni sui precedenti punti, oltre che su attività interdisciplinari.
La valutazione è stata affrontata con diversi strumenti: questionari di autovalutazione, test a risposta aperta o multipla e osservazione in itinere da parte dell’insegnante; inoltre al termine del percorso la valutazione specifica di robotica è stata sommativa di tutte le competenze raggiute.
I punti chiave di questa valutazione sono stati:
- La capacità di progettare un percorso;
- Le abilità costruttive e manuali: costruire un robot capace di eseguire un compito specifico;
- La capacità di costruire sequenze di programmazione corrette rispetto ad uno specifico task;
- La conoscenza della roboetica e del lavoro di Asimov;
- La conoscenza dei materiali e il loro utilizzo e pertinenza attraverso compiti di realtà;
- La capacità di lavorare in gruppo e di rispettare gli altri, mettendo a disposizione le proprie competenze, abilità e conoscenze;
- La capacità di risolvere problemi (sempre relativo ad un compito di realtà).
Al termine di ogni anno la valutazione degli apprendimenti è stata registrata nel Documento di Valutazione di ogni alunno, a fianco di tutte le altre discipline curricolari.
Il percorso di 5 anni di Robotica Educativa ha permesso agli studenti di sviluppare le otto competenze chiave per l’apprendimento permanente proposte dal Parlamento e Consiglio Europeo il 18 dicembre 2006 [13]:
- competenza multilinguistica: alcune lezioni sono state tenute in lingua inglese, approfondendo anche una terminologia tecnica specifica della Robotica;
- competenza matematica e competenza in scienze, tecnologie e ingegneria: la connessione tra STEM e Robotica è stata validata largamente in letteratura [8, 9, 10, 11];
- competenza digitale: utilizzo critico di più tecnologie ICT, come ad esempio il computer (impiegato non solo per la programmazione del kit ma anche per la ricerca di informazioni) e il robot;
- competenza personale, sociale: le attività di Robotica Educativa sono sempre state caratterizzate dal lavoro di gruppo, con una suddivisione dei ruoli tra gli studenti;
- capacità di imparare ad imparare: la natura fortemente laboratoriale delle attività e i feedback forniti dal robot durante il suo funzionamento facilitano una verifica delle proprie idee da parte dello studente, oltre che una verifica del proprio approccio risolutivo;
competenza in materia di cittadinanza: approfondimento su l’impatto dei robot nelle nostre vite, e su come regolamentare le relazioni tra essere umano e automa; - competenza imprenditoriale: creare artefatti creativi, saper esporre le proprie idee, portare avanti progetti innovativi;
- competenza in materia di consapevolezza ed espressione culturali.
Oltre che gli strumenti di valutazione precedentemente citati, per poter validare l’inserimento della Robotica all’interno del curricolo, al termine del percorso si sono analizzati i risultati delle prove INVALSI ottenuti dalla classe coinvolta nel progetto.
Risultati prove INVALSI Italiano classe V anno scolastico 2015
Media del punteggio percentuale al netto del cheating: 64,1
Esiti degli studenti al netto del cheating nella stessa scala del rapporto nazionale: 212,4
Differenza nei risultati (punteggio percentuale) rispetto a classi/scuole con background familiare simile: + 6,0
Background familiare mediano degli studenti: basso
Punteggio Lazio: 56,3
Punteggio Centro: 57,4
Punteggio Italia: 56,6
Risultati prove INVALSI Matematica classe V anno 2015
Media del punteggio percentuale al netto del cheating: 59,5
Esiti degli studenti al netto del cheating nella stessa scala del rapporto nazionale: 203,6
Differenza nei risultati (punteggio percentuale) rispetto a classi/scuole con background familiare simile: + 3,9
Background familiare mediano degli studenti: basso
Punteggio Lazio: 52,9
Punteggio Centro: 54,7
Punteggio Italia: 54,6
Dai punteggi ottenuti in Italiano e Matematica si può notare come la media sia stata più alta rispetto a quella delle altre scuole della regione Lazio, del Centro Italia e di tutta Italia.
La struttura della partnership: come la ricerca ha un impatto sul territorio
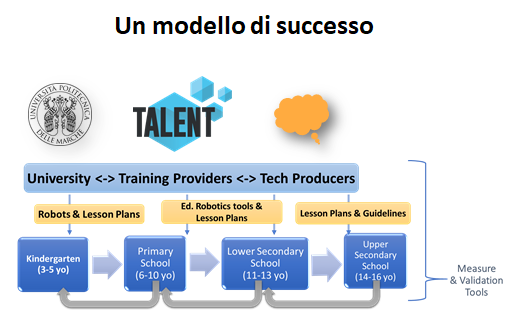
L’Università Politecnica delle Marche dopo la positiva esperienza iniziata nel 2010 con il progetto “Robotica a scuola” ha cercato di aumentare l’impatto della propria ricerca sul territorio creando una partnership forte con più attori del panorama educativo: l’obiettivo principale degli esperti del mondo accademico è quello di progettare strumenti hardware/software che possano ottimizzare l’introduzione della Robotica Educativa a scuola, e definire i protocolli metodologici e di valutazione legati alla Robotica Educativa. Numerose sono state le richieste di collaborazione giunte nel corso degli anni da parte di Istituti Comprensivi e Istituti di Istruzione Superiore, quindi sarebbe stato molto complesso seguire ognuna di queste scuole nel percorso formativo degli insegnanti e degli studenti. Per questo motivo si è creato una forte partnership con la startup innovativa marchigiana TALENT srl, nata per diffondere buone pratiche nell’uso della tecnologia a scuola (tra cui la Robotica Educativa).
Il lavoro a stretto contatto dei formatori della startup con i ricercatori dell’Università Politecnica delle Marche fa sì che lo standard qualitativo dei progetti svolti nelle scuole sia sempre molto alto, e gli interessi di ricerca richiedono una costante acquisizione di dati relativi agli apprendimenti degli studenti; queste permette un costante monitoraggio della proposta formativa introdotta negli istituti.
Le attività svolte da TALENT, che rispettano protocolli e tool sviluppati in collaborazione con UnivPM, sono costantemente aggiornate grazie ai feedback forniti dai dati raccolti sul campo. Questo schema di collaborazione permette di divulgare il lavoro svolto pubblicando articoli scientifici su riviste e convegni internazionali, così da ricevere un’ulteriore certificazione di qualità tramite le revisioni dei ricercatori esperti in questi ambiti.
Questo modello virtuoso ha portato negli anni a collaborare con oltre 40 Istituti Comprensivi e 10 Istituti di Istruzione Superiore (situati in 6 regioni italiane), ad ottenere fondi ministeriali per oltre 40 progetti (PON, In Estate si imparano le STEM etc.).
Alcuni degli articoli di questa bibliografia non sono in formato Open Access. Qualora si fosse interessati alla loro consultazione, si contatti l'autore di questo articolo all'indirizzo lorenzo.cesaretti@weturtle.org.
BIBLIOGRAFIA
[1] Cook, A. M., Bentz, B., Harbottle, N., Lynch, C., & Miller, B. (2005). School-based use of a robotic arm system by children with disabilities. IEEE transactions on neural systems and rehabilitation engineering, 13(4), 452-460.
[2] Fridin, M. (2014). Storytelling by a kindergarten social assistive robot: A tool for constructive learning in preschool education. Computers & education, 70, 53-64.
[3] Fridin, M., & Belokopytov, M. (2014). Acceptance of socially assistive humanoid robot by preschool and elementary school teachers. Computers in Human Behavior, 33, 23-31.
[4] Tapus, A., Peca, A., Aly, A., Pop, C., Jisa, L., Pintea, S., ... & David, D. O. (2012). Children with autism social engagement in interaction with Nao, an imitative robot: A series of single case experiments. Interaction studies, 13(3), 315-347.
[5] Blikstein, P., Worsley, M., Piech, C., Sahami, M., Cooper, S., & Koller, D. (2014). Programming pluralism: Using learning analytics to detect patterns in the learning of computer programming. Journal of the Learning Sciences, 23(4), 561-599.
[6] Blikstein, P. (2014). Analyzing engineering design through the lens of computation. Journal of Learning Analytics, 1(2), 151-186.
[7] Scaradozzi D., Sorbi L., Pedale A., Valzano M., Vergine C., "WeDo E LabVIEW insieme per la robotica educativa", LabVIEW World Journal, pp. 2-9, vol. 31, 2014
[8] Sorbi L., Scaradozzi D., Pedale A., Valzano M., Vergine C., "An Innovative Program to teach robotics at the primary schools”, Proc. of IARP 2014 Conference on Bio-inspired Robotics, pp. 13-18, Frascati, Italy 14-15 May 2014
[9] Scaradozzi D., Sorbi L., Pedale A., Valzano M., Vergine C., "Teaching Robotics at the Primary School: An Innovative Approach", Procedia - Social and Behavioral Sciences, pp. 3838-3846, vol. 174, 12 February 2015
[10] http://www.gjc.it/it/news/gjc-2012-i-vincitori
[11] https://www.youtube.com/watch?v=AHny5nDuTls
[12] Papert, S. (1993), Mindstorms: Children Computers and Powerful Ideas, New York: Basic Books.
[13] https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2006:394:0010:0018:IT:PDF
[14] Scaradozzi, D., Screpanti, L., Cesaretti, L., Mazzieri, E., Storti, M., Brandoni, M., & Longhi, A. (2016b). Rethink Loreto: we build our smart city!” A stem education experience for introducing smart city concept with the educational robotics. The 9th annual International Conference of Education, Research and Innovation (ICERI 2016), Seville, Spain.
[15] Screpanti, L., Cesaretti, L., Storti, M., Mazzieri, E., Longhi, A. (2018). An Educational Robotics activity to promote gender equality in STEM Education. In Proceedings of ICICTE 2018.Chania, Crete, Greece, 5-7 July 2018.
[16] Scaradozzi, D., Screpanti, L., Cesaretti, L., Storti, M., Mazzieri, E., (2018) Implementation and Assessment Methodologies of Teachers’ Training Courses for STEM Activities, Technology, Knowledge and Learning, pp. 1-21.
[17] Benitti, F. B. V. (2012). Exploring the educational potential of robotics in schools: A systematic review. Computers & Education, 58(3), 978-988.
Scopri i servizi di Weturtle
per il PIANO SCUOLA 4.0 del PNRR
Ottieni uno spazio di apprendimento con contenuti didattici per docenti e studenti, dove facilitare lo scambio e favorire la comunità di pratica e dove tenere sotto controllo i progressi della classe e dei docenti.
Vuoi leggere l'articolo quando vuoi, anche offline?
AUTORE

Lorenzo Cesaretti
Ho una laurea in Ingegneria Informatica e dell’Automazione all'Università Politecnica delle Marche e una grande passione per la didattica. Per 3 anni ha lavorato come progettista software...
AUTORE
Lorenzo Cesaretti
Ho una laurea in Ingegneria Informatica e dell’Automazione all'Università Politecnica delle Marche e una grande passione per la didattica. Per 3 anni ha lavorato come progettista software...
Scopri i corsi di formazione di WeTurtle
Scelto
per te