I risultati sono strettamente connessi agli obiettivi precedentemente presentati:
- Costruire un semplice modello matematico rispetto ad un problema posto (inseguire una linea).
- Utilizzare elementi base di programmazione (esecuzione sequenziale, ciclica e condizionata di istruzioni).
- Scoprire e utilizzare gli elementi base della teoria del controllo (feedback o retroazione).
- Comprendere gli algoritmi utilizzati in gran parte dei sistemi automatici (industriali e non).
Per quanto riguarda questi primi 4 obiettivi, possiamo dire che:
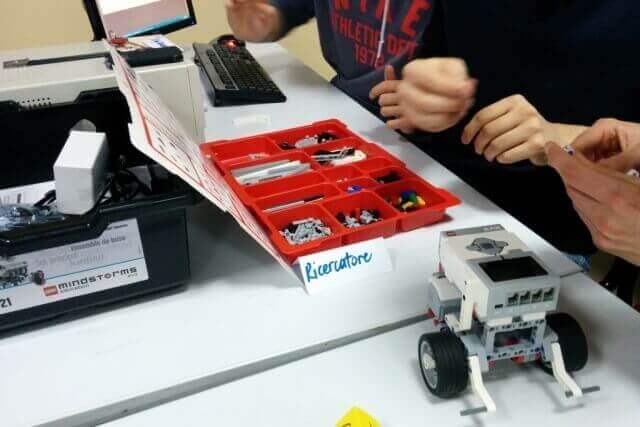
- Il 100% degli studenti coinvolti (circa 60) è riuscito a risolvere il problema “base”, ossia inseguire la linea, arrivando a costruire l’algoritmo di controllo proporzionale.
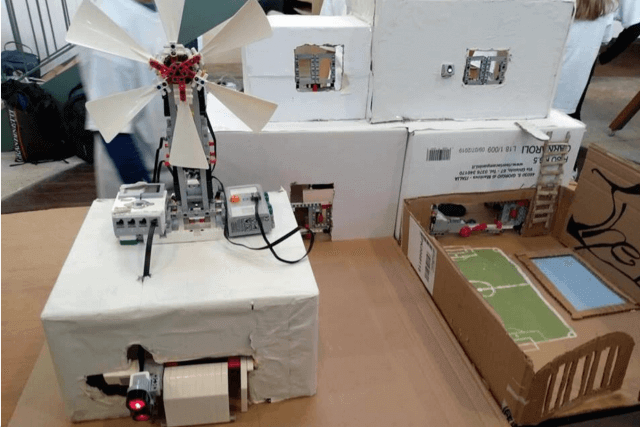
- Il 25% degli studenti coinvolti (circa 15) è riuscito a risolvere la sfida finale, combinando creativamente quanto appreso durante il corso.
Per quanto riguarda gli altri 3 obiettivi:
- Accrescere l’interesse verso le discipline STEM (Science Technology Engineering Maths).
- Migliorare la capacità degli studenti di lavorare in gruppo.
- Accrescere la consapevolezza degli alunni verso i propri processi cognitivi attraverso la valutazione dell’Alternanza.
Si è deciso di creare un questionario di
autovalutazione, caratterizzato dalle seguenti domande:
DOMANDE CHIUSEQ1- Ho capito le spiegazioni e le istruzioni che mi ha dato l'istruttore
Q2- L'istruttore è stato disponibile e attento alle mie domande e bisogni
Q3- Il metodo usato dall'istruttore è stato coinvolgente
Q4- È stato facile costruire i robot in gruppo
Q5- È stato facile utilizzare i software al computer
Q6- Ho frequentato volentieri le attività del laboratorio
Q7- Il clima in classe è stato sereno
Q8- Il lavoro nel mio gruppo è stato di collaborazione e sostegno
Q9- La mia relazione con uno o più compagni è migliorata
Q10- Ho trovato divertente e appassionante partecipare a questo tipo di alternanza Scuola-Lavoro
Q11- Mi piacerebbe prendere parte ad altri laboratori di Robotica più avanzati
DOMANDE APERTEChe cosa hai imparato in questo laboratorio?
Qual è la cosa che ti è piaciuta di più di questo laboratorio?
Secondo te c'è stato qualcosa che non è andato bene?
C'è qualcos'altro che avresti voluto fare nel laboratorio?
Abbiamo proposto una scala Likert a 5 punti, attraverso la quale gli studenti hanno potuto manifestare il livello di accordo rispetto alle domande proposte:
1 = per niente
2 = poco
3 = abbastanza
4 = molto
5 = moltissimo
Le domande chiuse sono organizzate attorno ai 3 obiettivi a cui sono legate in questo modo:
- Accrescere l’interesse verso le discipline STEM (Science Technology Engineering Maths). Q1, Q2, Q3, Q6, Q10.
- Migliorare la capacità degli studenti di lavorare in gruppo. Q7, Q8, Q9.
- Accrescere la consapevolezza degli alunni verso i propri processi cognitivi attraverso la valutazione dell’Alternanza. Q4, Q5, Q11.
Le domande aperte sono state inserite per far esprimere gli studenti liberamente, scrivendo impressioni, osservazioni e critiche relativamente all’esperienza vissuta (ma la loro analisi si trova
all’interno dell’articolo uscito sulla rivista Mondo Digitale, come accennato nell’Introduzione).
Il grafico seguente contiene i punteggi (in valore medio) scelti dagli studenti nel compilare il questionario.






 Tempo di lettura/visione: 20 min
Tempo di lettura/visione: 20 min Consigliato per la fascia d'età: SECONDARIA II GRADO
Consigliato per la fascia d'età: SECONDARIA II GRADO Adattabile alla fascia d'età: SECONDARIA I GRADO
Adattabile alla fascia d'età: SECONDARIA I GRADO

 Obiettivi e Competenze
Obiettivi e Competenze Metodologia didattica
Metodologia didattica Programma
Programma

 Valutazione
Valutazione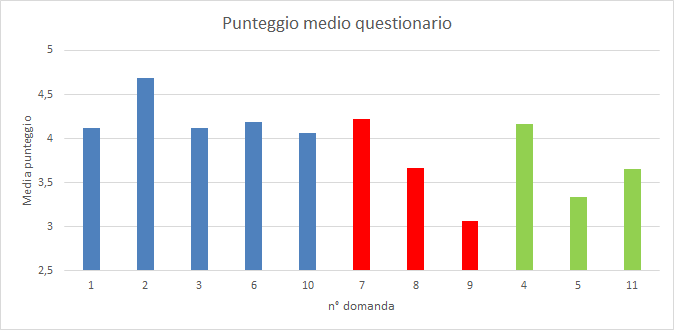
 Riferimenti e links
Riferimenti e links